A robot instrument finger with multiple degrees of freedom and its application
A degree of freedom and robotic technology, applied in the field of robotics, can solve problems such as application difficulties and lack of force perception ability of operating equipment, and achieve the effects of improving detection accuracy, high tension, and ensuring transmission accuracy and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The specific implementation manners of the present invention are given below and described in conjunction with the accompanying drawings.
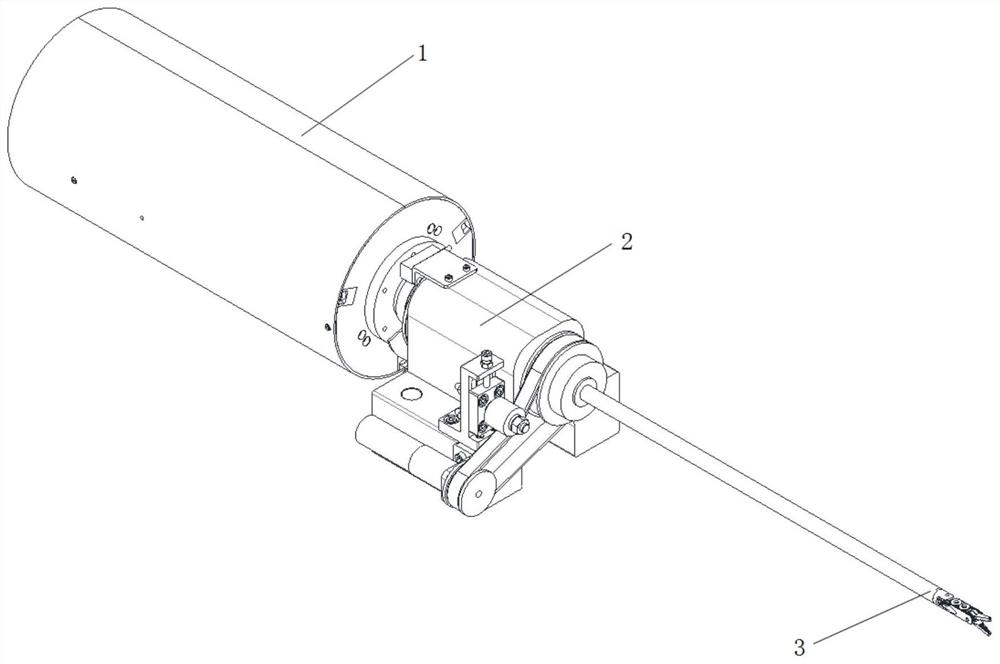
[0050] combine figure 1 , 2 , 4, 9 and 13, a robot instrument finger with multiple degrees of freedom, which consists of a drive mechanism 1, a mounting bracket mechanism 2 and a wrist finger mechanism 3. The driving mechanism 1 is connected with the wrist finger mechanism 3 via the mounting bracket mechanism 2 .
[0051] The wrist-finger mechanism 3 is driven by the cable with three degrees of freedom of pitching, deflection and / or clamping by the driving mechanism 1 .
[0052] The wrist finger mechanism 3 is driven by the mounting bracket mechanism 2 with a degree of freedom of rotation.
[0053] The wrist finger mechanism 3 has three degrees of freedom of motion, pitch, deflection and / or opening and closing.
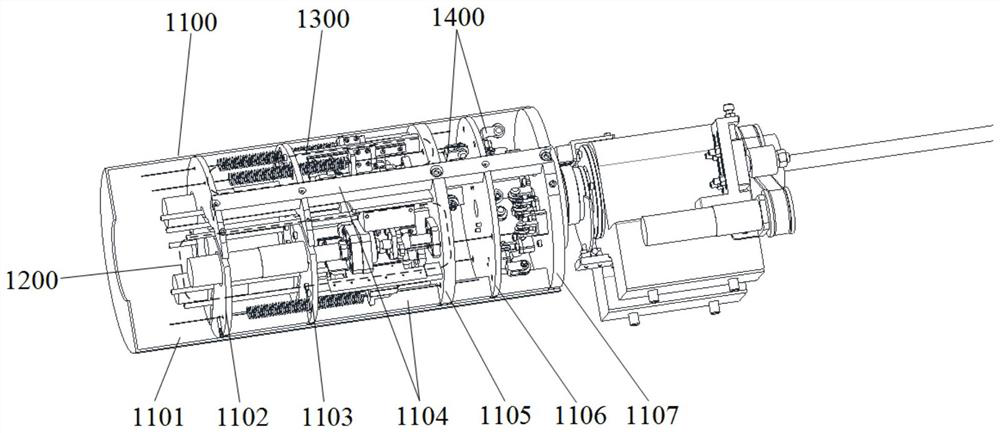
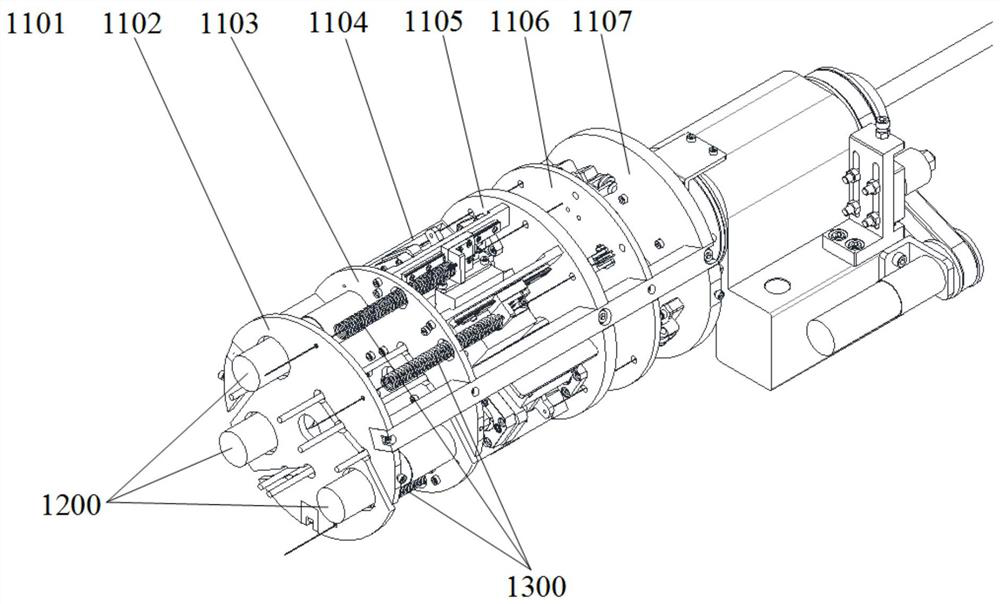
[0054] combine Figures 1 to 8 Further, the driving mechanism 1 is composed of a frame body mechanism 1100, 3 groups...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com