Contour error cross-coupling control method based on interference observation sliding mode variable structure
A sliding mode variable structure, contour error technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of unavoidable disturbance and affecting the tracking accuracy of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0068] The present invention will be further elaborated below by describing a preferred specific embodiment in detail in conjunction with the accompanying drawings.
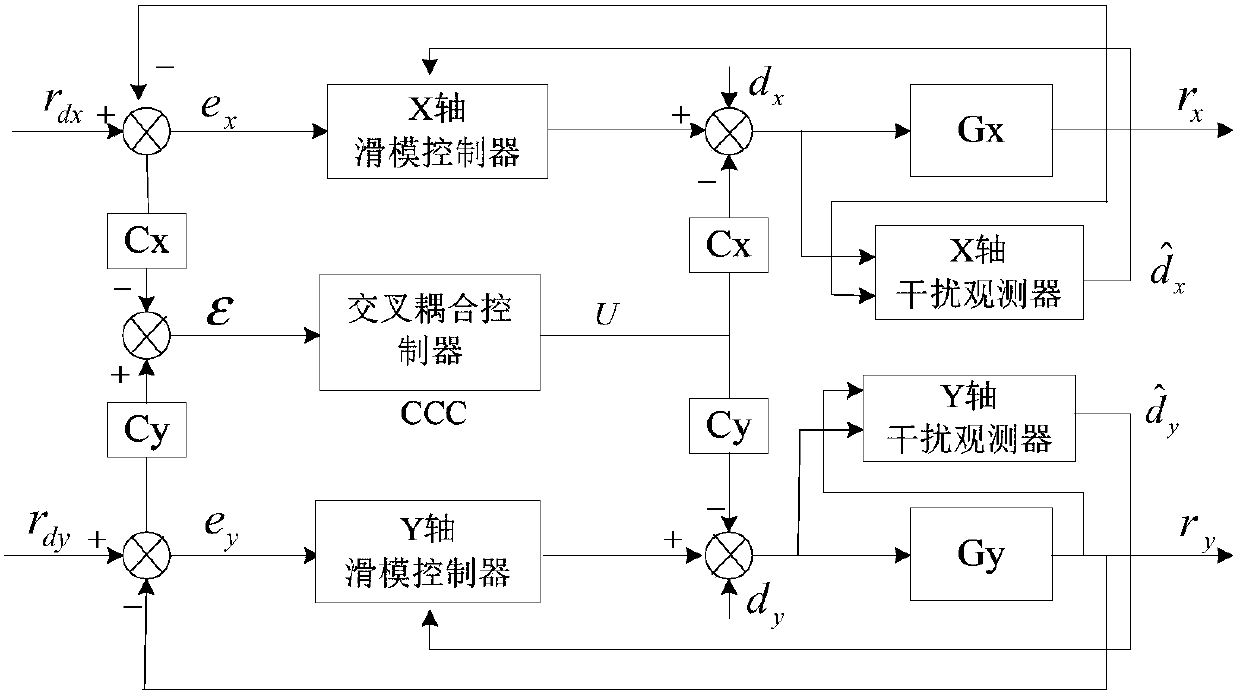
[0069] The present invention is a contour error cross-coupling control method based on disturbance observation sliding mode variable structure, the control method comprising:
[0070] S1, using sliding mode variable structure control for single-axis servo motion, and observing the disturbance through the disturbance observer.
[0071] Disturbances are effectively compensated:
[0072] details as follows:
[0073] Sliding mode variable structure control can make the state of the system move along the artificially specified sliding mode surface without being affected by parameter perturbation and external interference, has good robustness, and ensures single-axis tracking performance. In this step, the sliding mode variable structure control is adopted for the single-axis motion, and the disturbance is observed b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com