Vehicle positioning method
A vehicle positioning and vehicle technology, applied in directions such as road network navigators, can solve problems such as low matching accuracy between frames
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0090] like figure 1 Shown is a work flow chart of a vehicle positioning method provided by an embodiment of the present invention, including:
[0091] Step S101, use the local point cloud acquired by the vehicle in real time and the pre-saved map point cloud for positioning to obtain a point cloud positioning result, the initial resolution of the map point cloud is higher than the initial resolution of the local point cloud.
[0092] Among them, the map point cloud is a high-precision map, which can be obtained online by a high-resolution laser device, and then provided by offline high-precision matching (for example, using the General-ICP method that is time-consuming but can achieve higher precision than the ICP method).
[0093] Then use the high-precision map point cloud as cloud data for multiple low-precision laser automatic driving systems to use at the same time. The vehicle with the automatic driving system performs step S101, and can obtain the local point cloud thr...
Embodiment 2
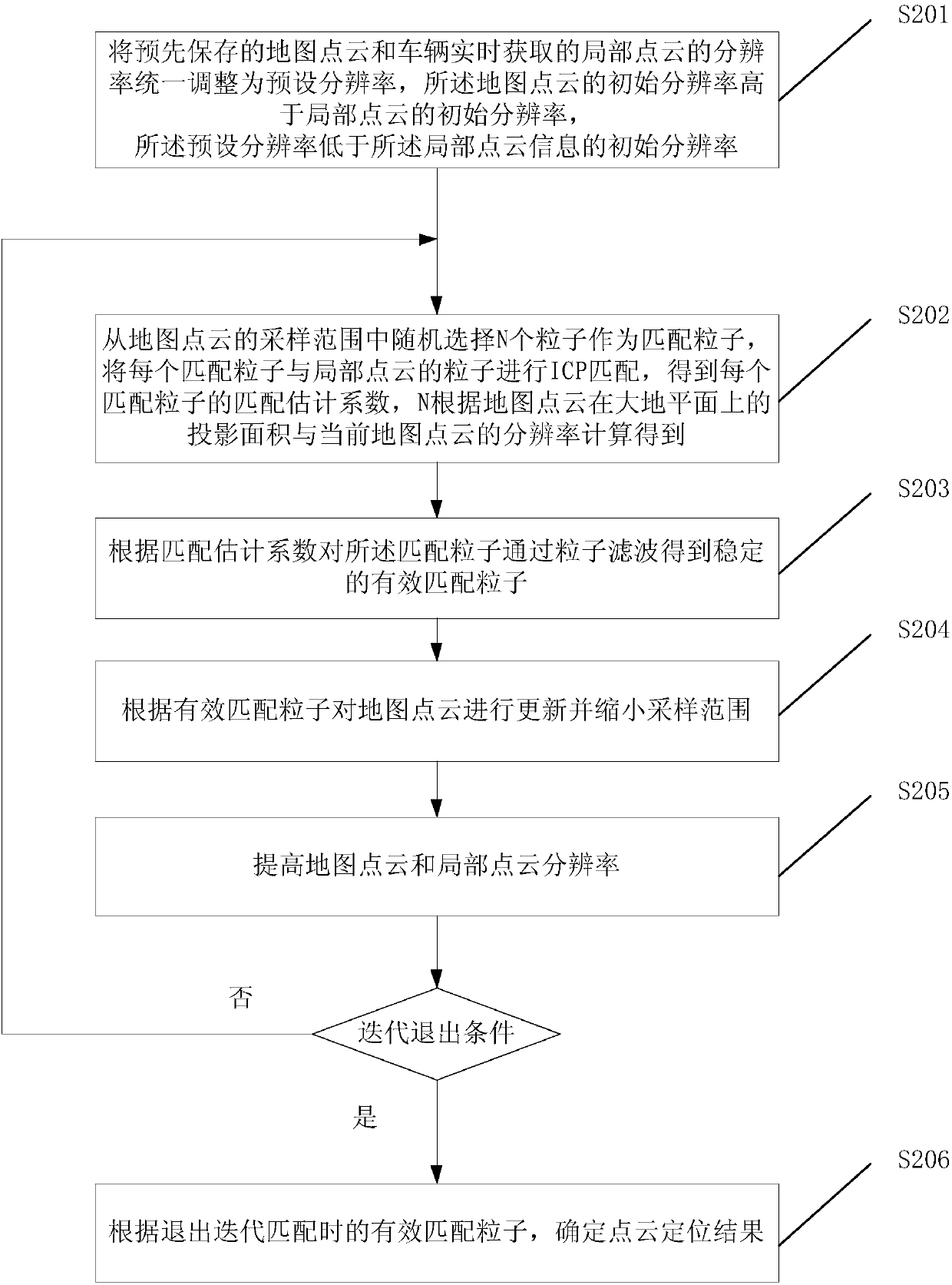
[0096] like figure 2 Shown is a work flow diagram of a vehicle positioning method provided by an optional embodiment of the present invention, including:
[0097] Step S201, the resolution of the pre-saved map point cloud and the local point cloud acquired by the vehicle in real time is uniformly adjusted to a preset resolution, the initial resolution of the map point cloud is higher than the initial resolution of the local point cloud, and the The preset resolution is lower than the initial resolution of the local point cloud information;
[0098] Specifically, the pre-saved map point cloud is converted into an octree structure to obtain a map octree structure, and the local point cloud acquired by the vehicle in real time is converted into an octree structure to obtain a local octree structure;
[0099] Adjust the map octree structure and local octree structure to the level corresponding to the preset resolution.
[0100] The octree is a hierarchical three-dimensional dat...
Embodiment 3
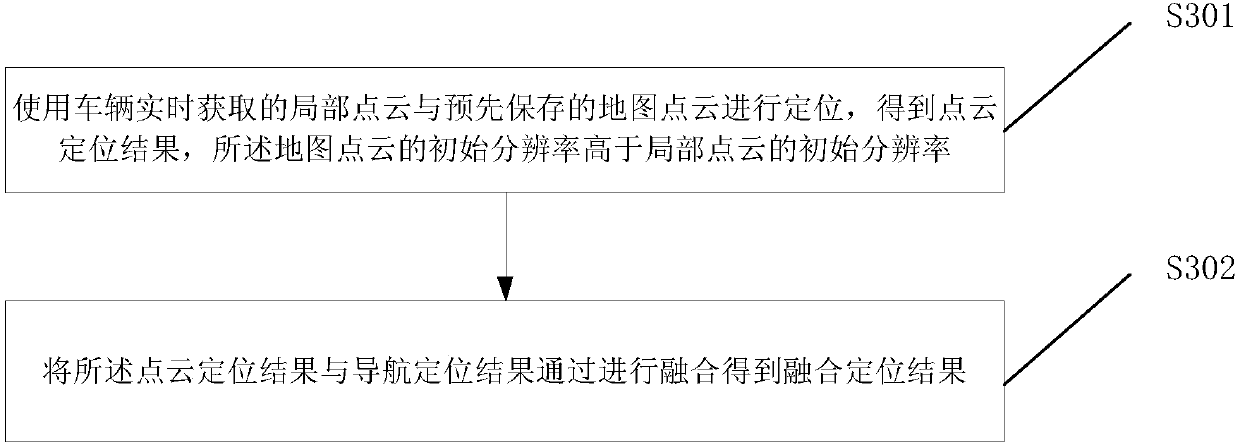
[0127] like image 3 Shown is a work flow diagram of a vehicle positioning method provided by another optional embodiment of the present invention, including:
[0128] Step S301, using the local point cloud acquired by the vehicle in real time and the pre-saved map point cloud for positioning to obtain a point cloud positioning result, the initial resolution of the map point cloud is higher than the initial resolution of the local point cloud.
[0129] In step S302, the point cloud positioning result and the navigation positioning result are fused to obtain a fusion positioning result.
[0130] Specifically, the point cloud positioning result and the navigation positioning result are fused through an extended Kalman filter to obtain a fused positioning result.
[0131] Since the stable release frequency of laser equipment is generally 10 Hz, the multi-resolution positioning release result in step S301 can only reach 10 Hz at most, while the environment perception algorithm an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com