Exoskeleton wolfberry picking mechanism
An exoskeleton and Lycium barbarum technology, applied in the direction of picking machines, manipulators, harvesters, etc., can solve the problems of low mechanization of picking operations, complex terrain in picking areas, and high cost of working hours, so as to achieve broad market application prospects, liberate labor productivity, The effect of saving economic cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
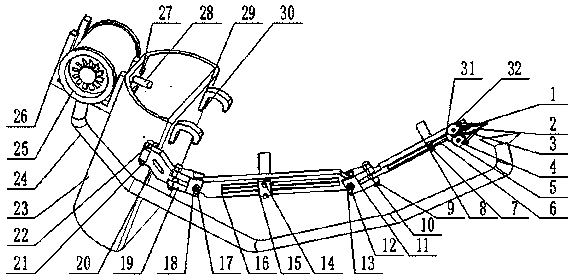
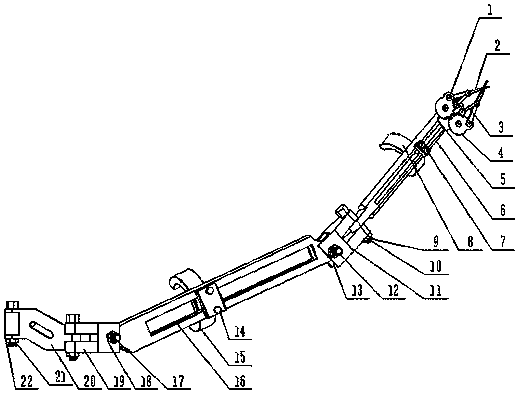
[0041] Embodiment 1: as Figure 1-7 As shown, an exoskeleton wolfberry picking mechanism includes an exoskeleton picking robot arm part, an intermediate connecting part and a fruit collecting part;
[0042] The exoskeleton picking mechanical arm part includes a cutting mechanism, a forearm manipulator mechanism, an upper arm manipulator mechanism, and a connecting frame I11;
[0043] The cutting mechanism is used for picking fresh wolfberry fruit;
[0044] The forearm manipulator mechanism is used to cooperate with the forearm of the staff to carry out the picking work;
[0045] The connecting frame I11 is used to connect the forearm manipulator mechanism and the upper arm manipulator mechanism; and is used to cooperate with the elbow joint movement of the staff during work;
[0046] The upper arm manipulator mechanism is used to cooperate with the upper arm of the staff to carry out the picking work;
[0047] The middle connecting part is used to connect the upper arm mani...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com