Collaborative positioning system and method based on node motion state constraint
A technology of cooperative positioning and state constraints, applied in the field of navigation, can solve the problems of fast node speed, long communication distance, poor positioning accuracy, etc., and achieve the effect of improving positioning accuracy, prediction accuracy and stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
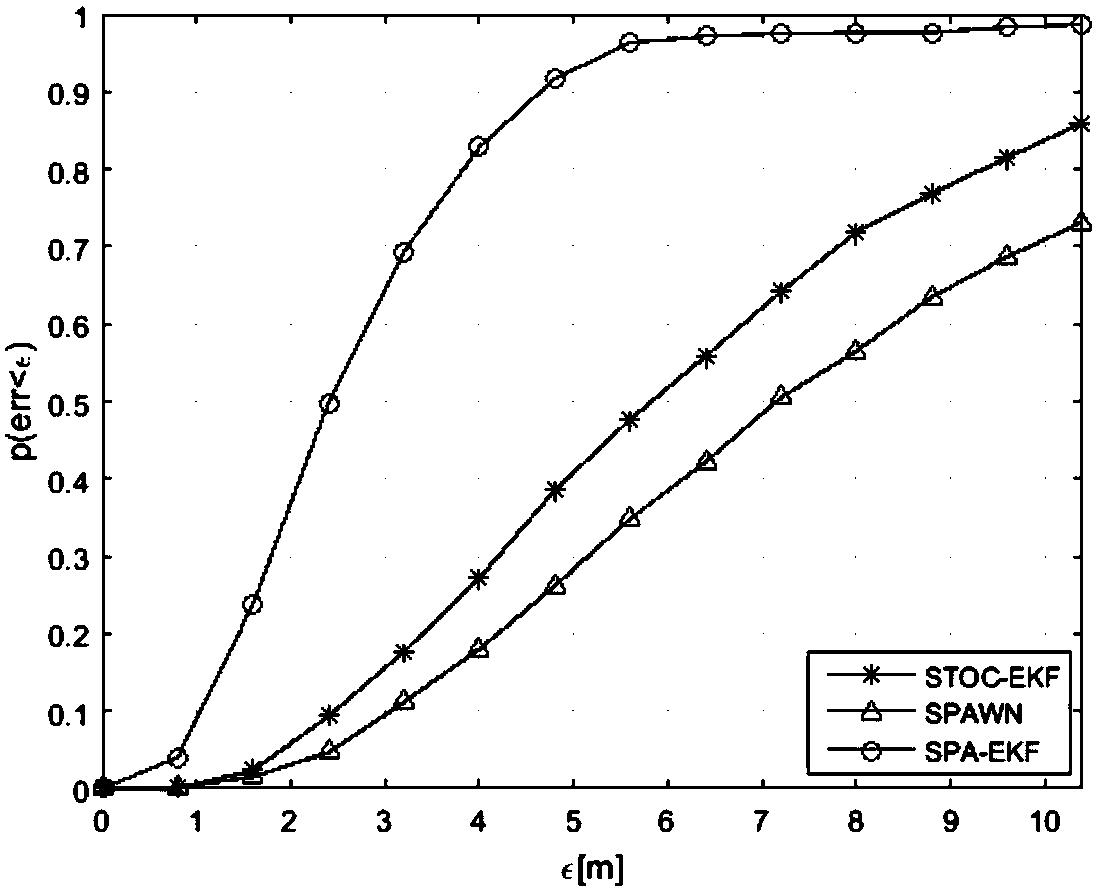
[0042] Take the extended Kalman filter algorithm as the node's motion state constraint, and use the parameterized confidence propagation algorithm to fuse the relative distance information of the node as an example. Set in a UAV network, there are 18 UAVs, of which 8 UAVs can locate themselves through GPS. There is a certain error in the position estimation information obtained through GPS, and other UAVs cannot complete it. Self-positioning, all drone nodes are randomly distributed in the range of 5000m×5000m. Due to the limitation of distance and power consumption and the occlusion of obstacles, each node can only communicate with some nodes in the network. The relative distance information between nodes can be obtained through the communication link, and the movement speed of each node is 40m / s. Around, acceleration is 1~2m / s 2 Between, the communication radius of the node is 1400m. The error standard deviation of the position obtained by GPS of the reference node is 5m, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com