Biped walking simulation evaluation system and method of robot based on six-degree-of-freedom legs
An evaluation system and robot technology, applied in the field of robot bipedal walking simulation evaluation system based on six-degree-of-freedom legs, can solve problems such as inability to complete simulation optimization tasks, and achieve the effects of saving prototype manufacturing and experiment costs and shortening development cycles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention is specifically described below through exemplary embodiments. It should be understood that the scope of the present invention should not be limited to the scope of the examples. Any changes or changes that do not depart from the gist of the present invention can be understood by those skilled in the art. The protection scope of the present invention is determined by the scope of the appended claims.
[0036] A specific embodiment of the present invention is described as follows:
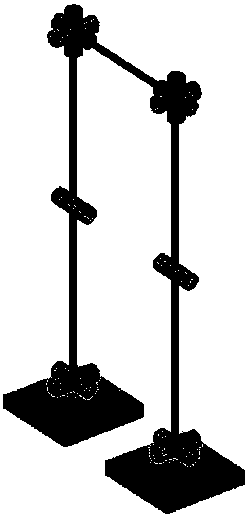
[0037] The configuration of the leg degrees of freedom of a 6-DOF legged biped robot is as follows: image 3 shown. The 3 hip joints are arranged orthogonally, so that the forward swing, side swing and vertical rotation of the leg can be realized; the knee joint has only 1 forward swing degree of freedom; the ankle joint has 2 degrees of freedom to complete the forward swing and side swing sports. The robot is able to perform a full range of walking motions includin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com