Double triangular suspension wheel-legged all-terrain mobile robot
A wheel-legged robot and mobile robot technology, applied in suspension, elastic suspension, electric steering mechanism, etc., can solve the problems of limited obstacle-crossing ability of wheeled movement, low efficiency of legged movement, poor driving smoothness, etc. Off-road performance, good maneuverability and stable performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0020] The specific embodiment that the present invention relates to is as follows:
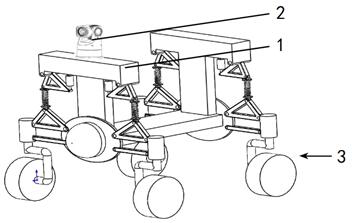
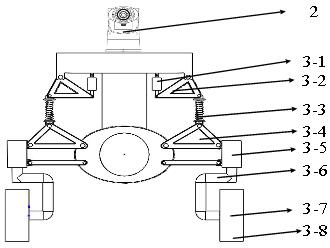
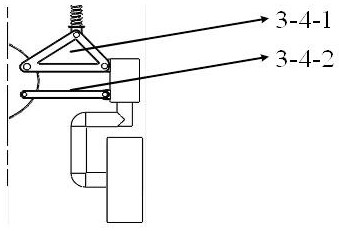
[0021] attached by figure 1 , 2 , shown in 3: a kind of double triangular suspension wheel-legged all-terrain mobile robot, this wheel-legged robot comprises a wheel-legged robot body 1, the radar system 2 that is arranged on the wheel-legged robot body 1, front and rear, left and right symmetrically arranged on The four wheel-leg robot single legs 3 on the wheel-leg robot body 1, each of the wheel-leg robot single legs 3 includes an actuator 3-1, a tripod 3-2 connected to the actuator 3-1, and a tripod 3 -2 damping spring 3-3, double wishbone suspension 3-4 connected to damping spring 3-3, steering motor 3-5 connected to double wishbone suspension 3-4, wheel leg 3 connected to steering motor 3-5 -6. The driving wheel 3-8 with the hub motor 3-7 connected to the wheel leg 3-6, the upper corner of the tripod 3-2 is connected to the wheel leg robot body 1, and the two ends are respectively co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com