A motion planning method of primal-dual neural network robot with nonlinear constraints
A technology of nonlinear constraints and neural network, applied in the field of robot motion planning with primal dual neural network, to achieve the effect of overcoming the problem of error accumulation and eliminating the problem of initial error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
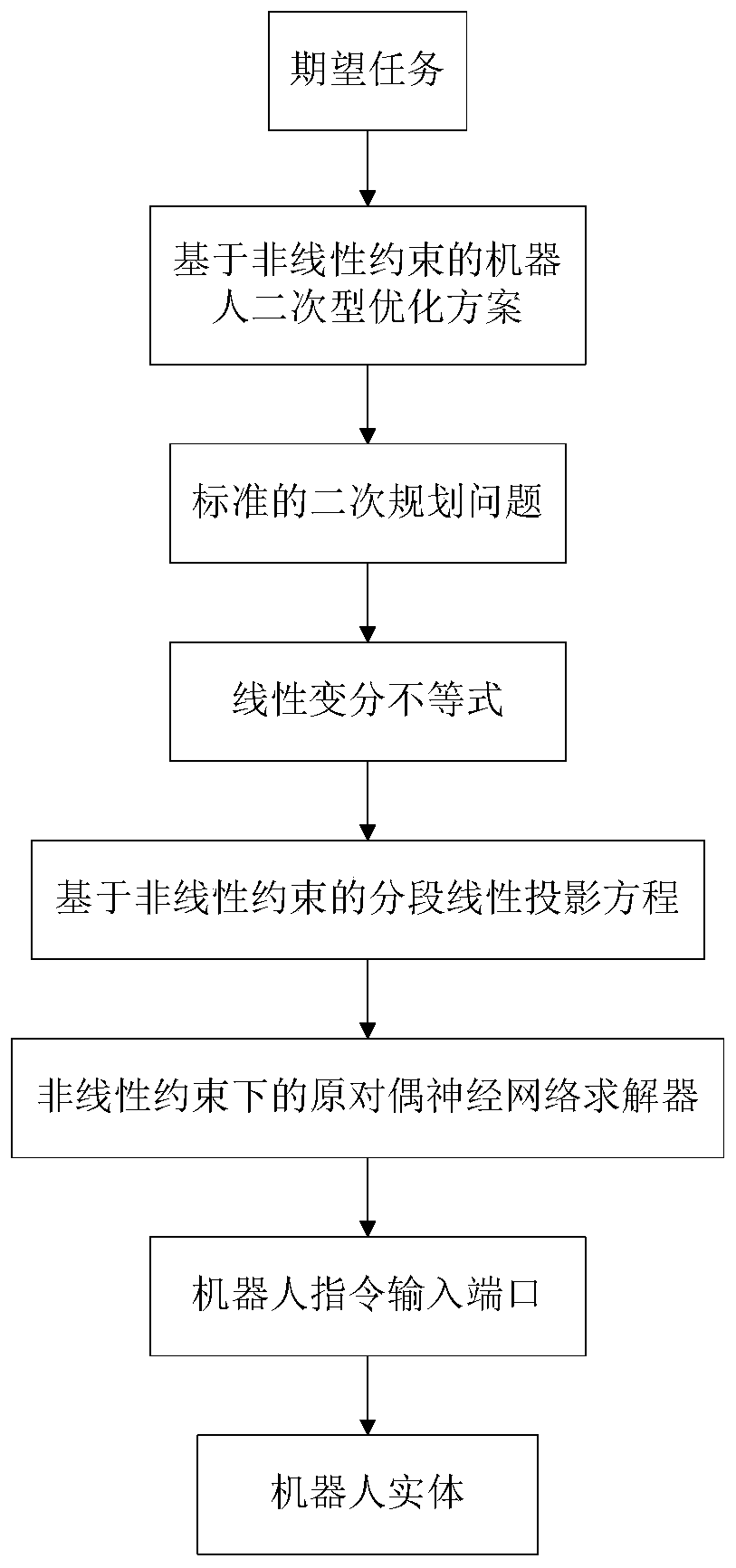
[0048] A primal-dual neural network robot action planning method under nonlinear equality constraints, including the following steps:
[0049] S1. Based on the desired task, the current state of the robot is acquired through sensors and the quadratic optimization scheme is used to analyze the robot trajectory in the speed layer. The performance index of the quadratic optimization scheme is the minimum speed two norm and has A feasible set constraint of a nonlinear equality constraint and a robot joint angle;
[0050] S2. Transform the quadratic optimization scheme of the robot based on nonlinear constraints designed in step S1 into a standard form of a quadratic programming problem;
[0051] S3. Solving a standard quadratic programming optimal solution problem in step S2 is equivalent to solving a linear variational inequality problem;
[0052] S4. Convert the linear variational inequality problem in step S3 into a solution to a piecewise linear projection equation based on nonlinear ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com