A trajectory planning method based on flow field in dynamic environment
A trajectory planning and dynamic environment technology, applied in the direction of motor vehicles, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems that non-integrity systems cannot be applied, and the trajectory is not smooth, etc., to achieve good integrity, The effect of strong universality and strong solution ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0048] Such as Figure 11 As shown, a flow field-based trajectory planning method in a dynamic environment includes the following steps:
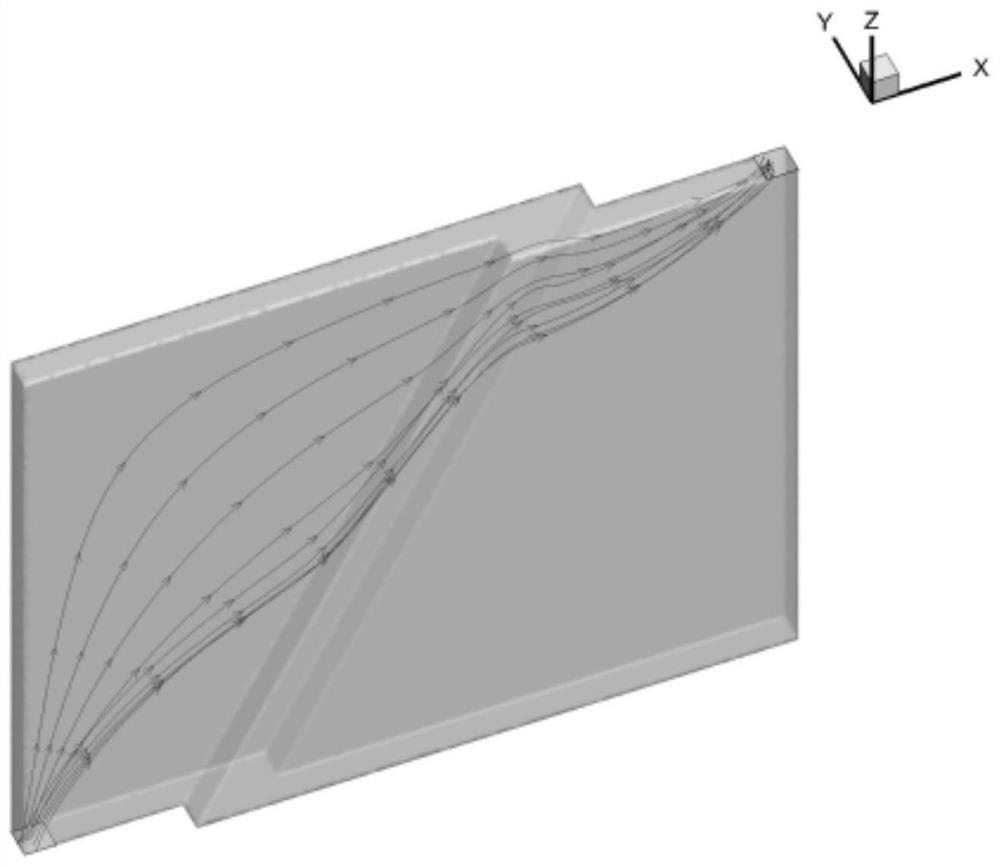
[0049] Establish a three-dimensional flow field calculation model according to the starting point, ending point and obstacles in the environment of the vehicle;
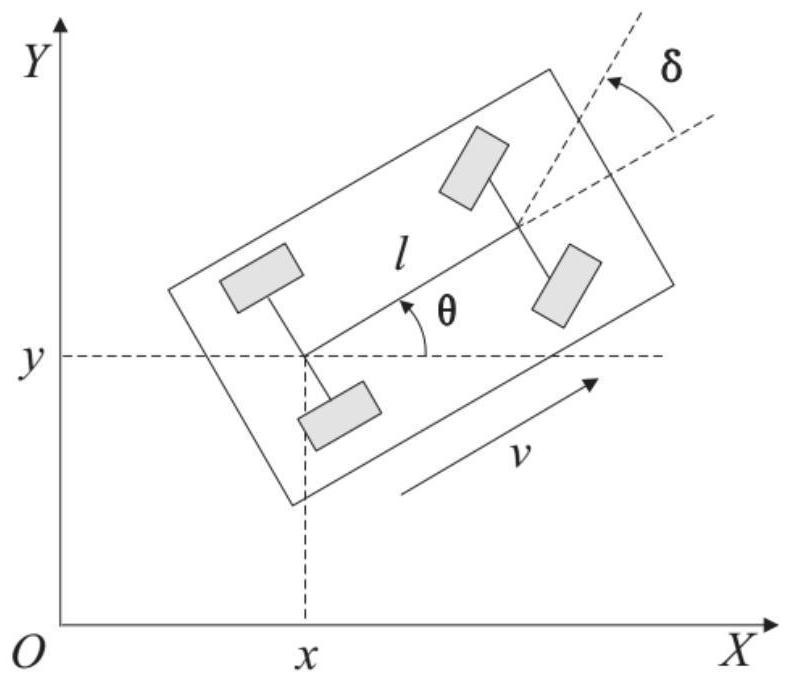
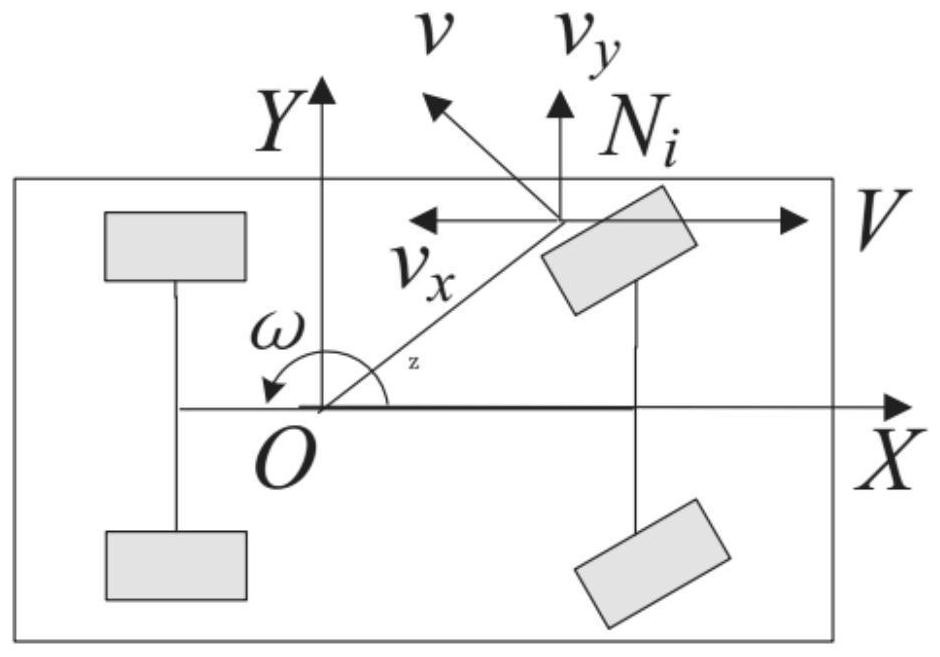
[0050] The vehicle kinematics model is established with the forward velocity of the vehicle body as the input and the coordinates and heading angle as the state quantity;
[0051] The vehicle kinematics model is used as the rolling equation to solve the rolling time-domain optimization problem of the flow field, and the velocity vector distribution of the flow field is used as the guiding information for trajectory planning to obtain the planned trajectory, where the optimization quantities are the forward velocity and yaw rate of the vehicle body , the optimization objective includes the consistency of the vehicle motion and the flow field motion, and the constraint conditions i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com