Indoor AGV (Automated Guided Vehicles) path planning method based on improved A* algorithm
A path planning and algorithm technology, applied in the field of indoor navigation, can solve problems such as touching obstacles and planning long paths, and achieve the effects of reducing the number of nodes, improving search efficiency, and good path planning effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific example
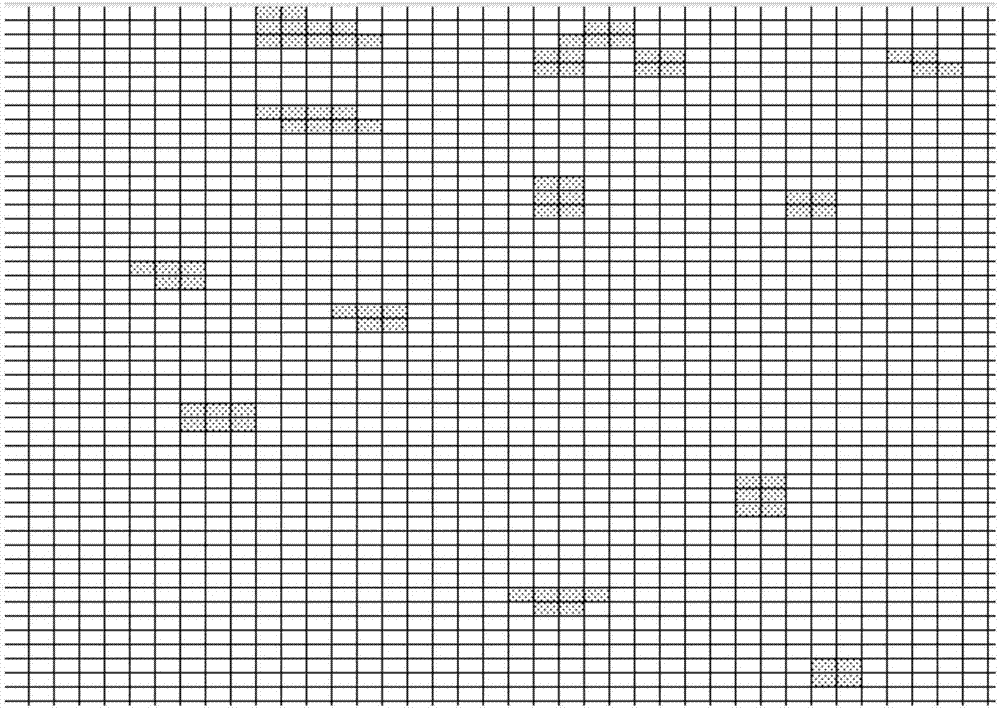
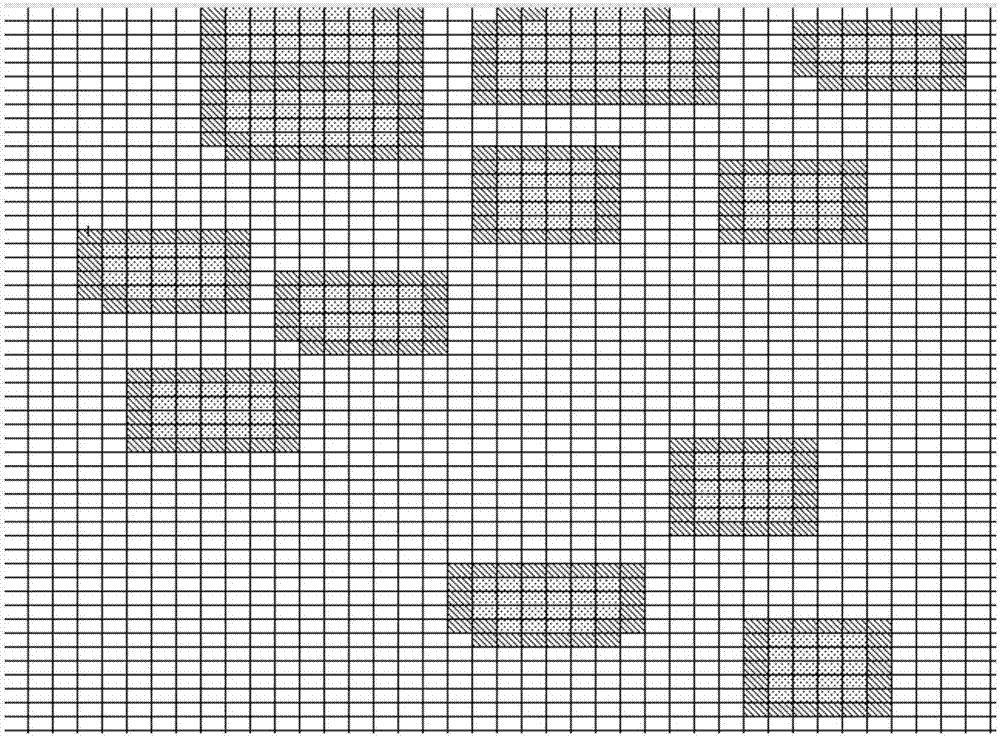
[0061] In order to verify the effectiveness of the algorithm of the present invention, the simulation map adopts a grid model of 50×40, each grid size is 0.4m×0.4m, the starting point is set to (1,1), and the end point is set to (48,38). The path planned by the traditional A* algorithm is as follows: image 3 As shown, since the traditional A* algorithm does not consider the AGV size, the map is expanded twice in the improved A* algorithm, and the cost function is optimized. Figure 5 is the path planning graph after expanding the map, Figure 6 It is the path diagram of the actual AGV in the obstacle environment.
[0062] Table 1 shows the parameter comparison between the traditional A* algorithm and the improved A* algorithm. The traditional A* algorithm uses the Manhattan distance without considering the size of the AGV. The planned path length is short, but there are many dangerous points (points closer to obstacles), and the search solution space is also large, and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com