


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Small light unmanned aerial vehicle semi-physical simulation system and simulation method
A physical simulation and unmanned aerial vehicle technology, applied in general control systems, control/adjustment systems, instruments, etc., can solve the problems of adjusting parameters, unable to effectively reflect the dynamic performance of actuators, and unable to simulate quantitative analysis of test results online, etc. , to achieve the effect of improving fidelity, increasing authenticity and effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
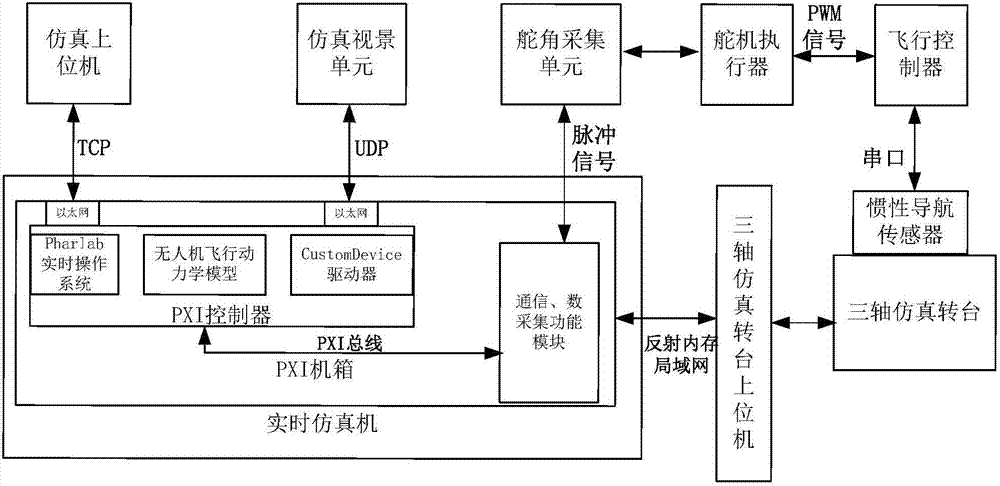
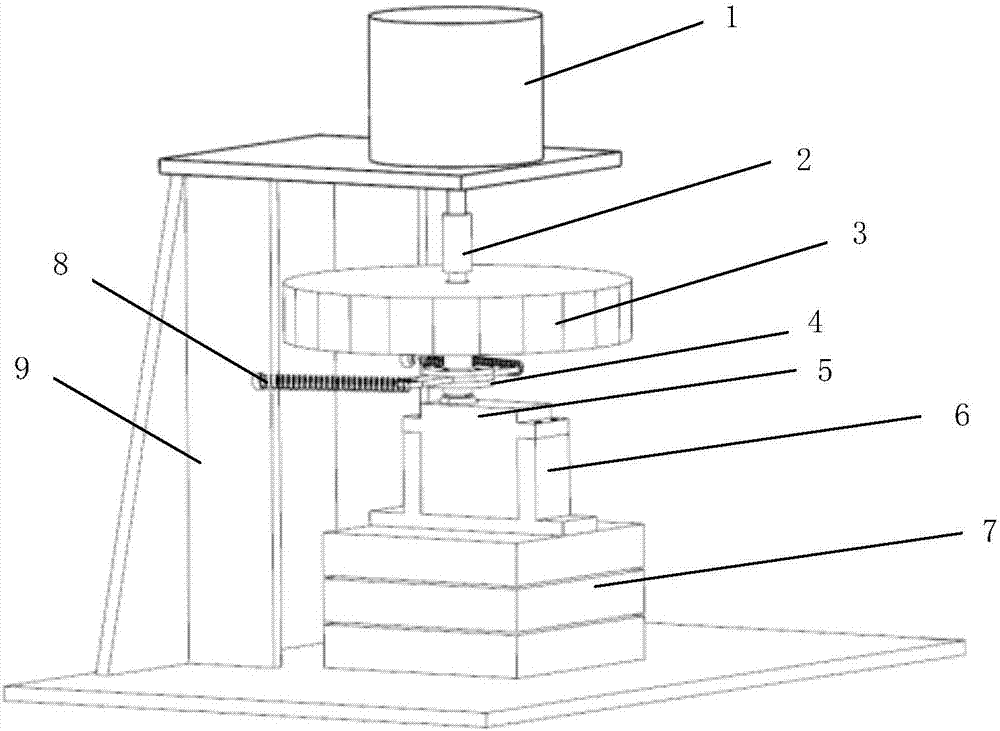
[0037] Specific implementation mode 1. Combination figure 1 with 2 In this embodiment, a semi-physical simulation system for light and small unmanned aerial vehicles is composed of a simulation host computer, a real-time simulator, a three-axis simulation turntable host computer, a three-axis simulation turntable, a rudder angle acquisition unit, and a simulation vision unit.
[0038] Run the Veristand real-time test software on the simulation host computer, connect the simulation host computer to the network port of the PXI controller on the real-time simulator, and exchange data through the TCP protocol. When starting the simulation, the UAV flight dynamics digital model is compiled into a dynamic link library file on the simulation host computer, loaded into the simulation project through the Veristand project configuration and deployed to the real-time simulator. The execution of the simulation process and the interaction between the simulation host computer and the real-...
specific Embodiment approach 2
[0047] Embodiment 2. This embodiment is a simulation method of a light and small unmanned aerial vehicle semi-physical simulation system described in Embodiment 1. The method is implemented by the following steps:
[0048] (1) On the simulation host computer, the flight dynamics model of the UAV is generated according to the compilation requirements to generate a dynamic link library file;
[0049] (2) Create a corresponding CustomDevice driver with LabVIEW software according to the simulation device driver requirements on the simulated host computer;
[0050] (3) Establish a Veristand project on the simulation host computer, load the dynamic link library and the CustomDevice file, configure the IP address connected to the real-time simulation machine, and set the model simulation step size;
[0051] (4) Deploy the Veristand project on the simulation host computer to the real-time simulator running the PharLap real-time operating system;
[0052] (5) The real-time simulator c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com