


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Anti-collision control method, device and system
A control method and anti-collision technology, applied in the field of intelligent transportation, can solve problems such as low collision safety, achieve the effects of avoiding collision accidents, improving driving safety, and reducing accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0030] This embodiment provides an anti-collision control method, which is used for controlling a terminal capable of moving or driving, such as a car, to avoid a collision risk. The execution subject of this embodiment is the anti-collision control device, which can be set in the server, or partly set in the server and partly set in the terminal.
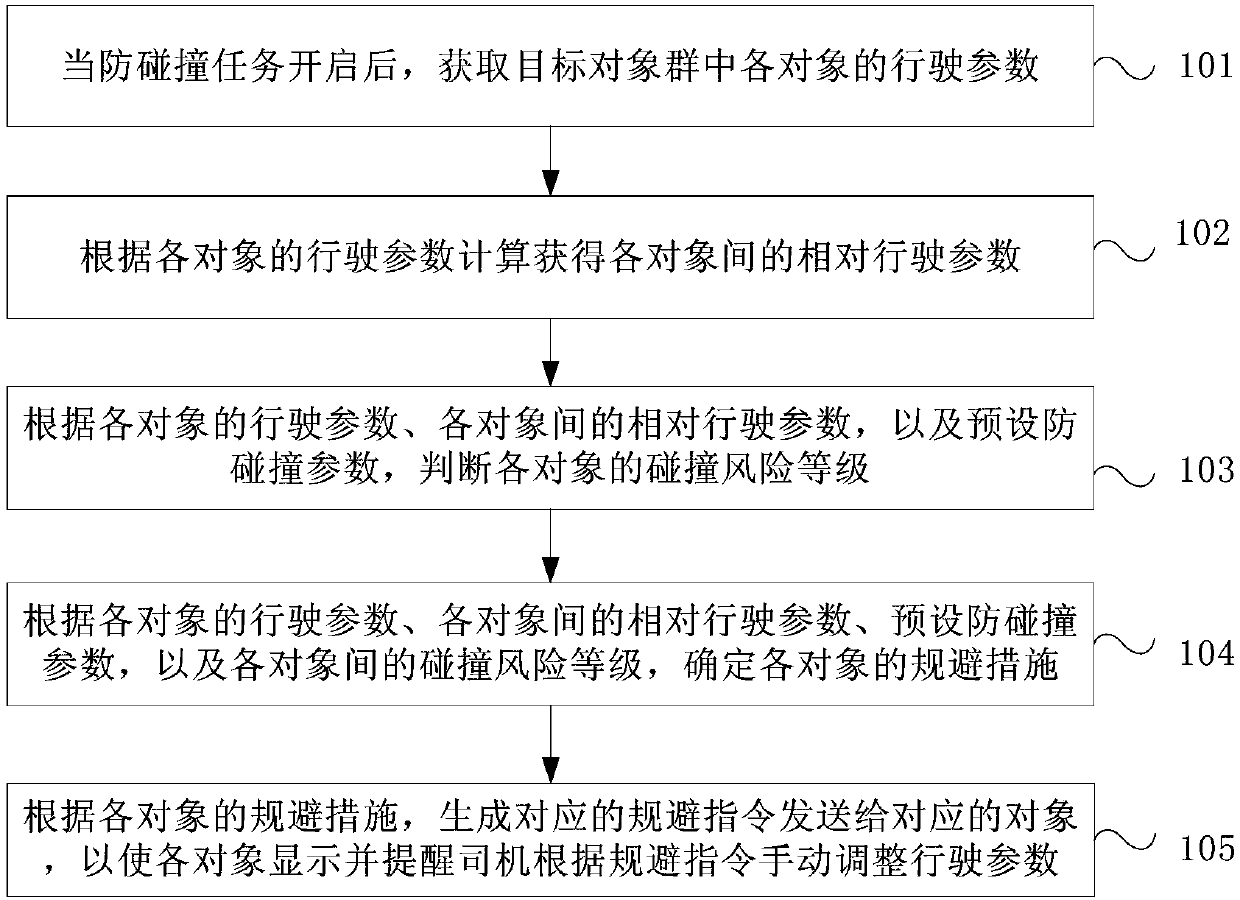
[0031] like figure 1 As shown, it is a schematic flow chart of the anti-collision control method provided in this embodiment, the method includes:
[0032] Step 101, when the anti-collision task is started, the driving parameters of each object in the target object group are acquired.
[0033] Step 102, calculate and obtain the relative driving parameters among the objects according to the driving parameters of each object.
[0034] Step 103, according to the driving parameters of each object, the relative driving parameters between each object, and the preset anti-collision parameters, determine the collision risk level of each ...
Embodiment 2
[0046] This embodiment provides a further supplementary description of the anti-collision control method provided in the first embodiment.
[0047] As an implementable manner, on the basis of the first embodiment above, optionally, the avoidance measure includes adjusting the speed or direction, or adjusting the speed and direction.
[0048] As another implementable manner, on the basis of the first embodiment above, optionally, after generating corresponding avoidance instructions according to the avoidance measures of each object and sending them to the corresponding objects, the method further includes: Assuming that the driving parameters are not manually adjusted according to the avoidance instruction within a certain period of time, the control object is forced to automatically adjust the driving parameters according to the avoidance instruction.
[0049] As yet another implementable manner, on the basis of the first embodiment above, optionally, before acquiring the dri...
Embodiment 3
[0085] This embodiment provides an anti-collision control device for implementing the anti-collision control method provided in the first embodiment above.
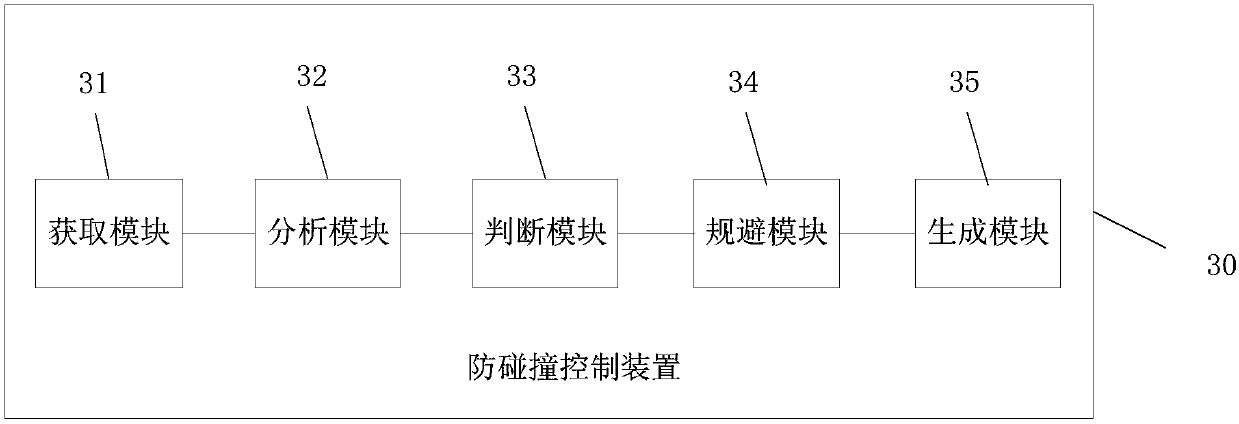
[0086] like figure 2 Shown is a schematic structural diagram of the anti-collision control device provided in this embodiment. The anti-collision control device 30 includes an acquisition module 31 , an analysis module 32 , a judgment module 33 , an avoidance module 34 and a generation module 35 .
[0087] Wherein, the acquisition module 31 is used to acquire the driving parameters of each object in the target object group after the anti-collision task is started, and send the driving parameters of each object to the analysis module; the analysis module 32 is connected with the acquisition module 31 for receiving and acquiring The running parameters of each object sent by the module 31, and according to the running parameters of each object, the relative running parameters between each object are calculated, and the run...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com