Pilotless automobile and working method thereof
A technology for unmanned vehicles and car bodies, which is applied in vehicle components, installation, optics, etc., and can solve problems such as barriers to popularization and reliability of unmanned vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
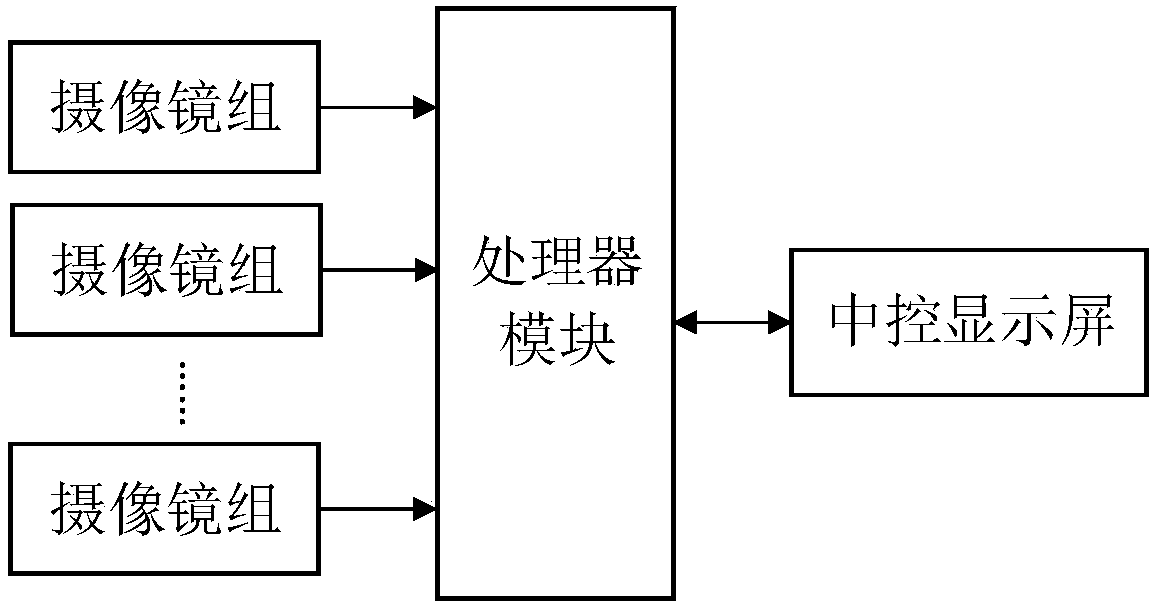
[0040] Such as figure 1 As shown, the embodiment of the present invention provides a driverless car, including:
[0041] A plurality of camera mirror groups arranged around the vehicle body, and a processor module electrically connected to each camera mirror group, and the processor module is also connected to the central control display screen;
[0042] Each of the imaging mirror groups is suitable for collecting image data in corresponding directions of the vehicle body;
[0043] The processor module is suitable for identifying objects in the image data, and when the object is identified as a dangerous object, the central control display screen sends an alarm signal; it can also control the car to avoid.
[0044] The processor module can be an ARM processor module; each camera mirror group can be located at the front of the car body, the parking space and the two sides of the car, and there are at least four; The large truck is identified in the image data of the side came...
Embodiment 2
[0093] On the basis of embodiment 1, this embodiment 2 provides a working method for driverless cars, including:
[0094] A plurality of camera mirror groups arranged around the vehicle body, and a processor module electrically connected to each camera mirror group, and the processor module is also connected to the central control display screen;
[0095] Each of the imaging mirror groups is suitable for collecting image data in corresponding directions of the vehicle body;
[0096] The processor module is suitable for identifying objects in the image data, and when the object is identified as a dangerous object, the central control display screen sends an alarm signal and controls the vehicle to avoid.
[0097] In this embodiment, the structure, working principle and working process of the self-driving car have been described in detail in Embodiment 1, and will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com