A wireless intelligent magnetic suction welding robot and its working method
A welding robot and magnetic suction technology, applied in the field of robotics, can solve problems such as inconvenient operations for operators to follow up
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
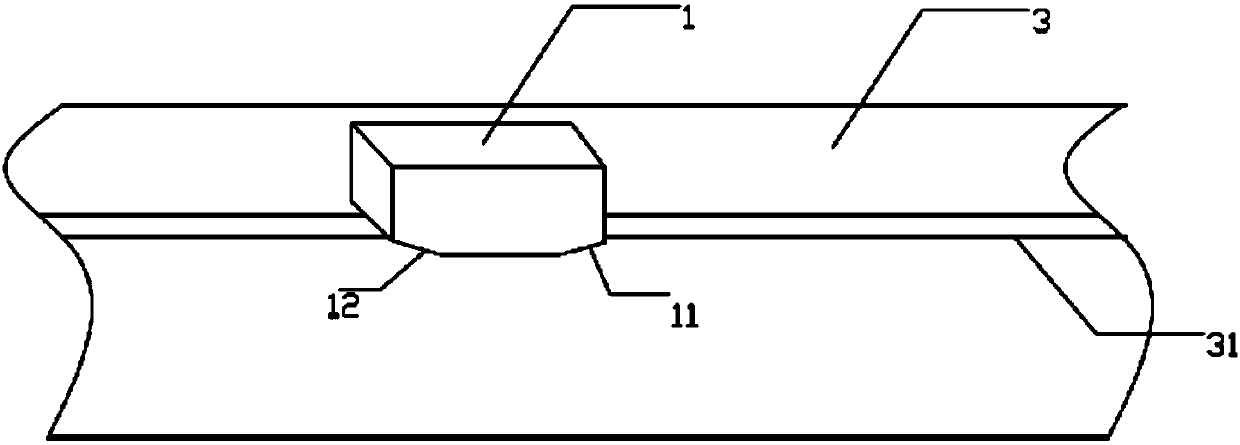
[0039] like Figure 1 to Figure 3 This embodiment provides a magnetic suction welding robot (hereinafter may be referred to as a robot for short).
[0040] The magnetic suction welding robot of the present invention includes a body 1, the body 1 includes a top surface, a side surface and a bottom surface, the robot is provided with a welding head (not shown), and a permanent magnet 2 is arranged inside the body, and the permanent magnet 2 is located at the bottom of the body 1 In the middle position of the body 1, there is a cam 4 at the bottom of the body 1. The cam 4 protrudes from the bottom of the body 1. The workbench 3 is roughly a magnetically conductive plane. The workbench 3 is provided with a track 31. When the robot is placed on the workbench , the permanent magnet 2 adsorbs the robot on the workbench 3, the cam 4 is located in the track, and the bottom of the cam 4 contacts the track 31, and the permanent magnet 2 adsorbs the lower surface of the body on the upper ...
Embodiment 2
[0058] On the basis of Embodiment 1, Embodiment 2 also provides a working method of a magnetic suction welding robot.
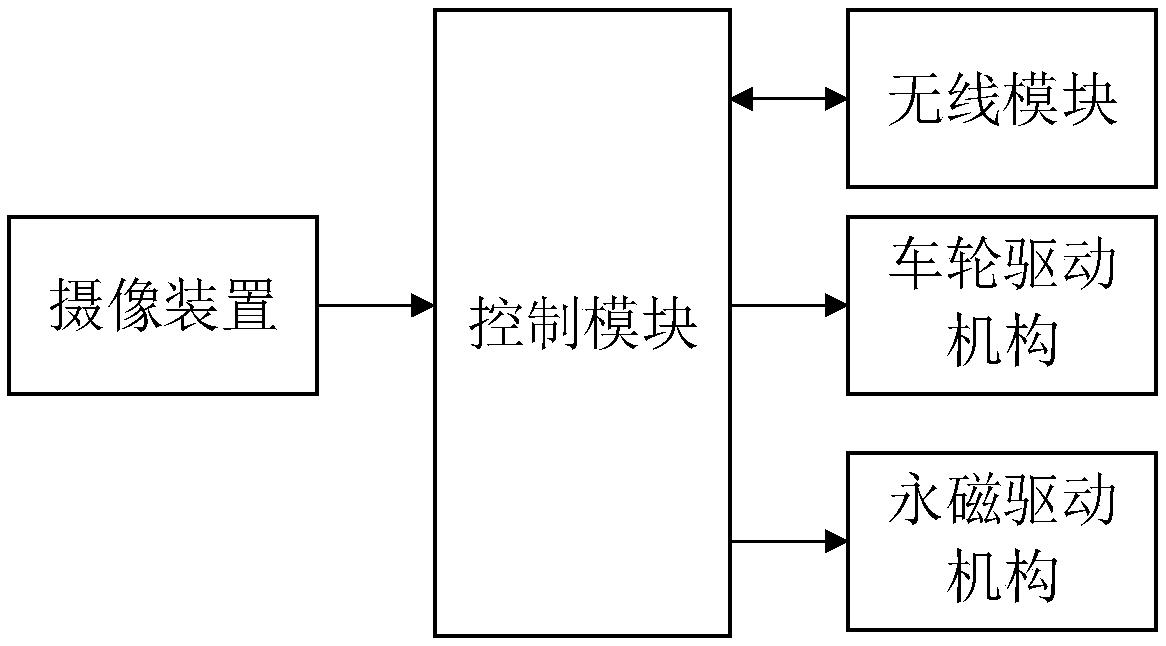
[0059] The magnetic suction welding robot includes: a main body, a control module located in the main body, a wheel drive mechanism located at the bottom of the main body, and a camera device located at the front end of the main body;
[0060] The working method includes: the camera device sends the collected video data to the control module, and the control module is adapted to be electrically connected with a wireless module to send the collected video data to the handheld terminal, and receives the handheld terminal The control signal sent by the terminal is used to control the wheel drive mechanism to travel.
[0061] In this embodiment, the structure and working principle of the magnetic field changing device in the magnetic welding robot have been described in detail in Embodiment 1, please refer to the corresponding content of Embodiment 1, and will no...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com