Lossless intelligent graded harvester of fence wall type fresh edible grapes and control method of lossless intelligent graded harvester
A technology of fresh grapes and harvesting machines, which is applied to harvesting machines, sorting machines, picking machines, etc. It can solve the problems of high labor intensity, high cost, grape damage, etc., and achieve improved work efficiency, simple and reasonable structure, and guaranteed grape quality. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
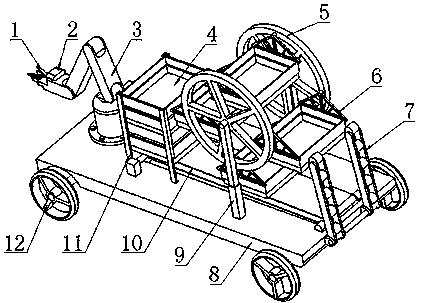
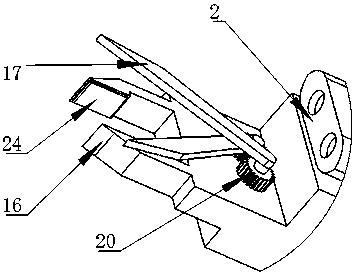
[0029] Embodiment 1, combining Figure 1 to Figure 5 , a non-destructive intelligent grading harvester for hedge-type table grapes, comprising a mobile platform 8, a main controller 25 and a motor installed below the mobile platform 8, and a rotating mechanical arm 3 installed in front of the mobile platform 8. The end of arm 3 is equipped with picking device 1, and image acquisition device 2 is installed on the top of rotating mechanical arm 3 ends, and the rear of rotating mechanical arm 3 is equipped with grading rotating device, and harvesting box 4 is placed in the grading rotating device; Both the device 1 and the grading rotating device are driven and controlled by a motor, and both the motor and the image acquisition device are electrically connected to the main controller.
[0030] The image acquisition device 2 is a depth camera, which is used for image acquisition, and transmits the acquisition information to the main controller; all degrees of freedom of the rotati...
Embodiment 2
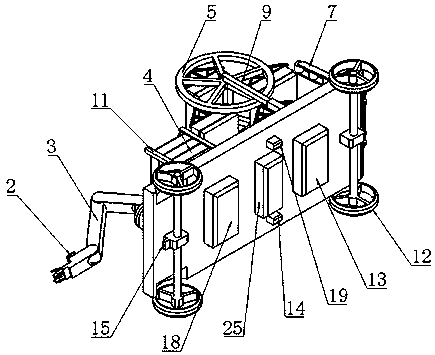
[0037] Embodiment 2, the difference between this embodiment and Embodiment 1 is that an empty harvest box temporary storage rack 11 is provided between the rotating mechanical arm 3 and the grading rotation device, and the empty harvest box temporary storage rack 11 It is made up of 4 vertically placed triangle irons, and a telescopic cuboid boss 21 is distributed on the inner side of the triangle iron. Notch above Harvest Box 4. The master controller controls the expansion and contraction of the telescopic cuboid boss, and the transmission of the harvest box can be realized in combination with the transmission device.
Embodiment 3
[0038] Embodiment 3, the difference between this embodiment and Embodiment 1 is that an ultrasonic sensor 15 is installed below the mobile platform 8, and a sensor is provided on the upper side edge of the harvest box 4, and the sensor and the ultrasonic sensor 15 are all connected to the main body. The controller is electrically connected. When the ultrasonic sensor detects an obstacle, it uploads a signal to the main controller. The main controller slows down the harvester to a stop by controlling the motor and sends out an alarm. After the obstacle is cleared, the main controller continues to control the motor drive to work; the harvesting box The upper edge is equipped with a sensor to detect the picking level in the collection box, and it will be sent to the main controller after picking is full.
[0039] The control method of above-mentioned embodiment 1-3, comprises following technology:
[0040] 1. After the motor drives the mobile platform to move to the picking posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com