Multi-UAV trajectory planning method based on cultural ant colony search mechanism
A multi-UAV, track planning technology, applied in two-dimensional position/channel control, data processing application, prediction and other directions, can solve the problem of not being able to find the optimal track, difficult to meet flight constraints, and accurate particle swarm algorithm Insufficient degree problem
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0049] The following examples describe the present invention in more detail.
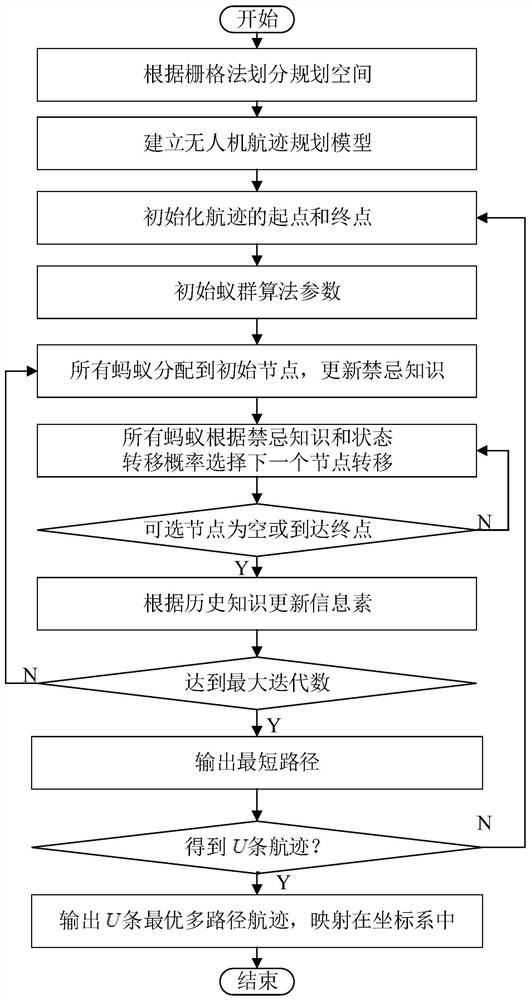
[0050] Step 1: Use the grid method to divide the planning space into grids.
[0051] Let the abscissa range of the planning space be [x min ,x max ], where x min is the minimum value of the abscissa, x max is the maximum value of the abscissa, and the range of the ordinate of the planning space is [y min ,y max ], where y min is the minimum value of the ordinate, y max is the maximum value of the ordinate. Let the grid size be N grid , then the total number of grid columns in the planning space is: The total number of grid rows is The number of common nodes N=h×q. Number all nodes in order from bottom to top and from left to right, if the i-th node p i The coordinates are (x i ,y i ), the calculation formula of its node number is:
[0052] Step 2: Establish a multi-UAV trajectory planning model.
[0053] In this model, assuming that the UAV keeps the altitude and speed constant d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com