Group robot area coverage search system imitating physarum polycephalum foraging behavior
A multi-headed vesicular bacteria and swarm robot technology, applied in the field of search systems, can solve the problems of high price and low search efficiency, and achieve the effects of fast search speed, simple implementation and high search efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
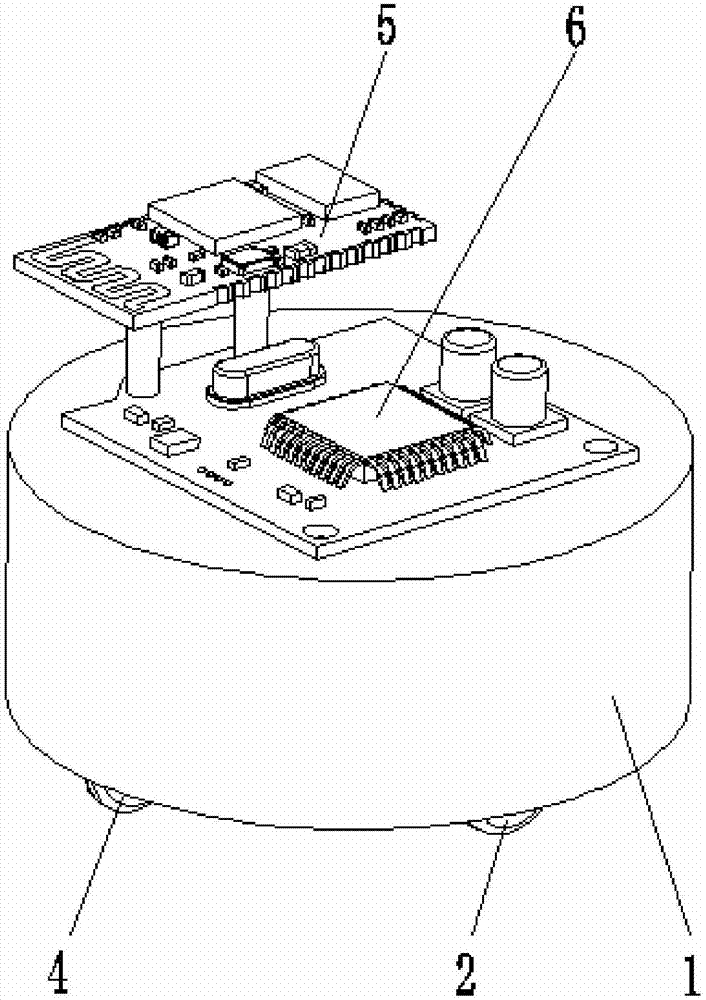
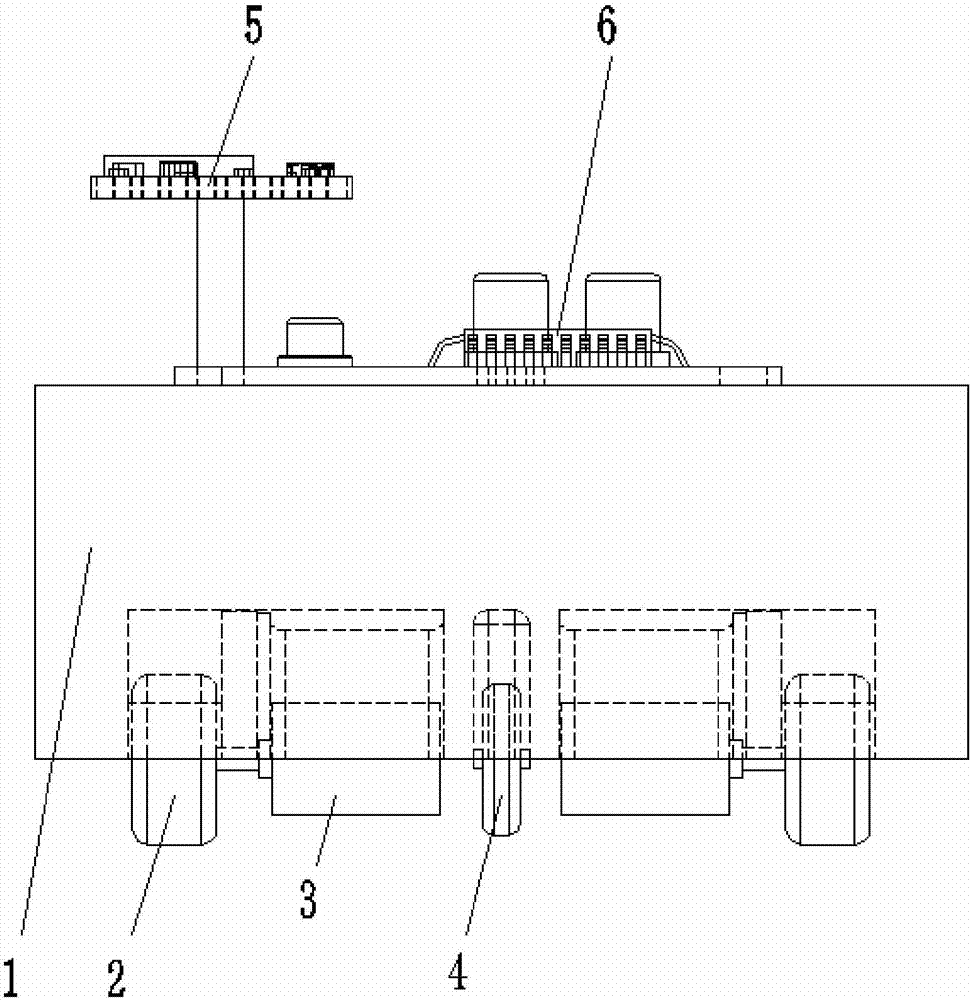
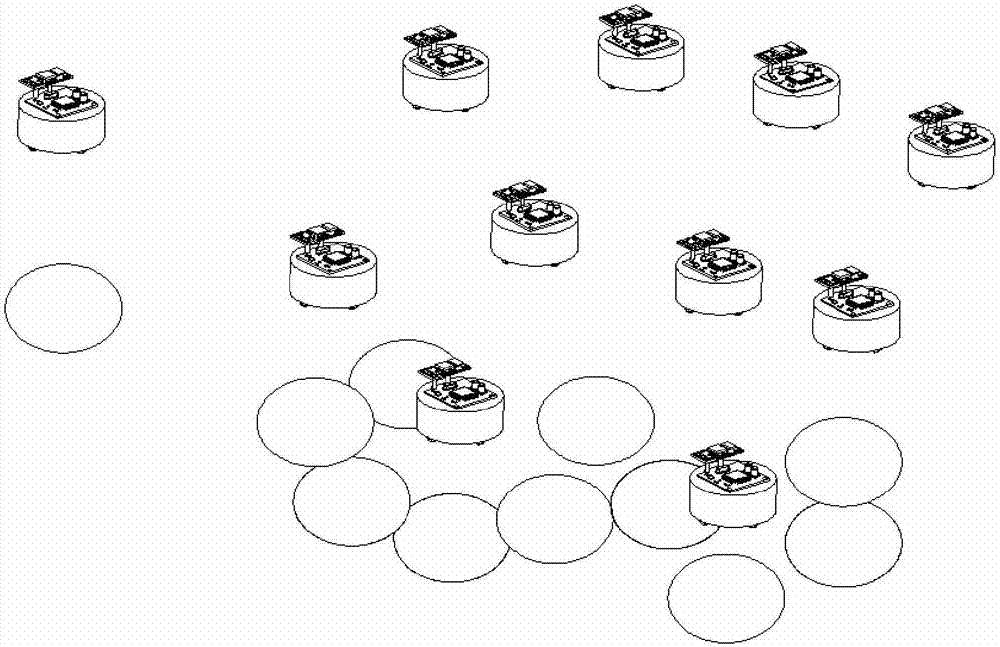
[0032] Embodiment: The group robot area coverage search method of imitating the foraging behavior of Phymophora polycereus involved in the target search control system based on the intelligent behavior of Phylomona polycephalum is experimented and verified on the Auto robot platform, and the search system of the specific The method is as follows: Step 1: Imitate the center of Physarum polycephalum, randomly assign IDs, and use the largest ID value as the center of the robot network; the robot tries to move in a certain direction, and has been judging by the communication and distance measurement information of the Bluetooth module 5 The strength of the center signal, and then the ARM microprocessor 6 outputs an electrical signal to control the movement of the high-torque steering gear 3, driving the robot to move in the direction where the center signal is strong, and realizing multi-robot aggregation, such as image 3 shown; Step 2: When the robots are too close to each other,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com