Synchronous positioning and map construction method of moving robots based on ultrasonic sensors
A multi-ultrasonic sensor and mobile robot technology, applied in the field of robotics, can solve the problems of insufficient information for mobile robot synchronous positioning and map construction, unable to meet the path planning of mobile robots, rarely positioning and building maps, etc., achieving low cost and easy implementation , the effect of easy installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0046] The present invention will be described in further detail below in conjunction with the accompanying drawings.
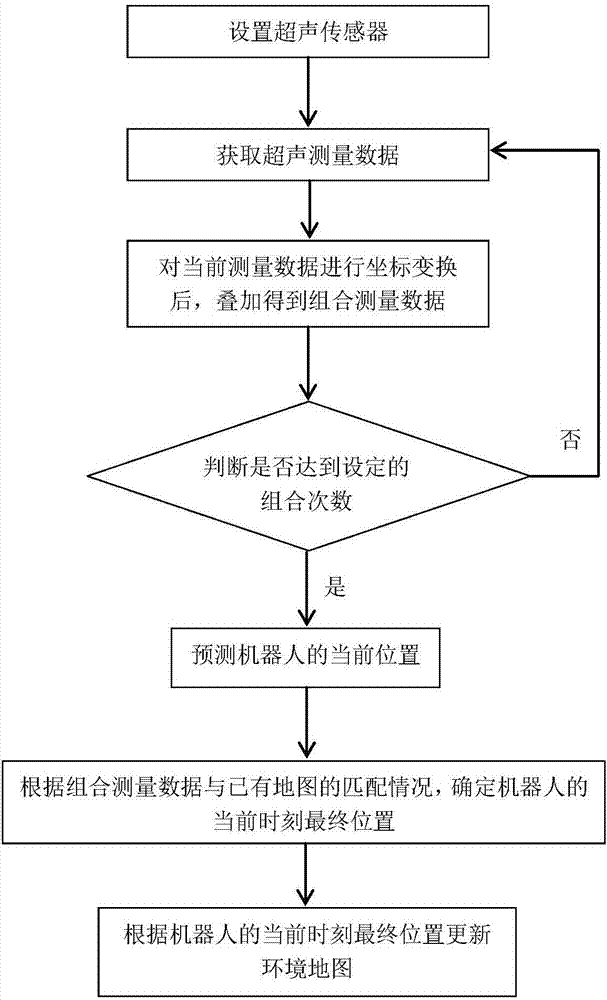
[0047] attached figure 1 , the realization steps of the present invention are as follows.
[0048]Step 1, set up the ultrasonic sensor.
[0049] Arrange 16 or more ultrasonic sensors evenly on the same level around the robot body, and the ultrasonic sensors in the front and rear parts of the robot body are symmetrically distributed; these ultrasonic sensors deployed around the robot body can be used without introducing rotating parts Increase the perception of information in the environment and obtain distance information.
[0050] refer to figure 2 , taking setting 16 ultrasonic sensors on the robot as an example, the setting method is as follows:
[0051] Set ultrasonic sensors No. 1 to No. 8 on the front side of the robot body with the same spacing and place them evenly; set ultrasonic sensors No. 9 to 16 on the rear side of the robot body with the sa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com