Fast registration method of 3D point cloud data with color information
A three-dimensional point cloud and color information technology, applied in image data processing, instruments, computing, etc., can solve the problems of too many steps and complex point cloud registration, and achieve the effect of improving efficiency and shortening registration time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
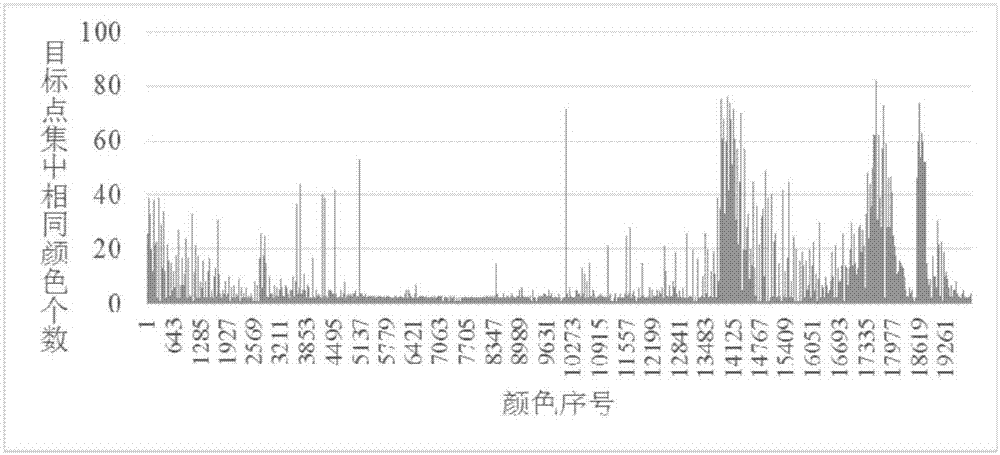
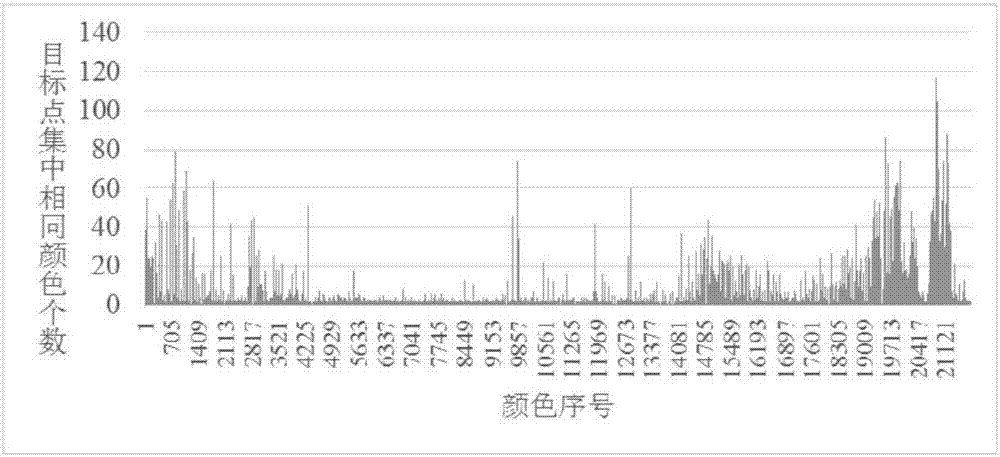
[0040] 1. Point information statistics and color filtering with the same color
[0041]Assume two point cloud datasets P and Q, where P is the target point set and Q is the registration point set. Theoretically, points with the same name in different datasets should have the same or similar colors, so there are some points with the same color in the two datasets. Count the RGB numbers in the two data sets separately, and classify all points into the same color, figure 1 and 2 Respectively represent the number of points in the target point set and registration point set with different RGB values.
[0042] Count the distribution of points owned by each color, and get Table 1.
[0043] Table 1 Number distribution of points with the same color in the two point cloud datasets
[0044]
[0045] In order to increase the probability o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com