Coelacanth-imitating underwater robot
A technology of underwater robots and coelacanths, applied in the field of robotics, to achieve the effect of intelligent swimming and efficient movement characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
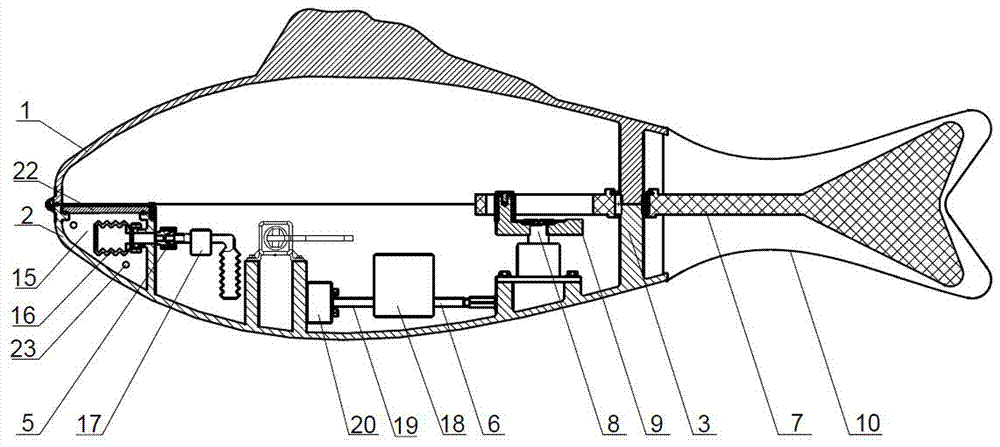
[0031] Such as Figure 1-3 As mentioned above, a coelacanth-like underwater robot is composed of a fish-like cavity composed of an upper cavity 1 and a lower cavity 2 symmetrically arranged up and down, and a control module and a tail fin respectively arranged in the cavity. Module 3, pectoral fin auxiliary module 4, buoyancy adjustment module 5 and center of gravity adjustment module 6; wherein:
[0032] The caudal fin drive module 3, the pectoral fin auxiliary module 4, the buoyancy adjustment module 5 and the gravity adjustment module 6 are connected to the control module respectively, and the tail fin drive module 3 is controlled to drive the tail to bend through the pressure sensor, attitude sensor and positioning sensor of the control module, and the curved The liquid pressure difference between the concave and convex sides of the tail forms a pressure to push the robot forward.
[0033] The caudal fin driving module is located at the middle and rear of the fish-like ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com