Stair-climbing robot powered by green energy resources
A green energy and robot technology, applied in the field of stair-climbing robots, can solve the problems of complex control structure and poor stability of stair-climbing robots, and achieve the effects of simple control structure, good stair-climbing stability and fast stair-climbing speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
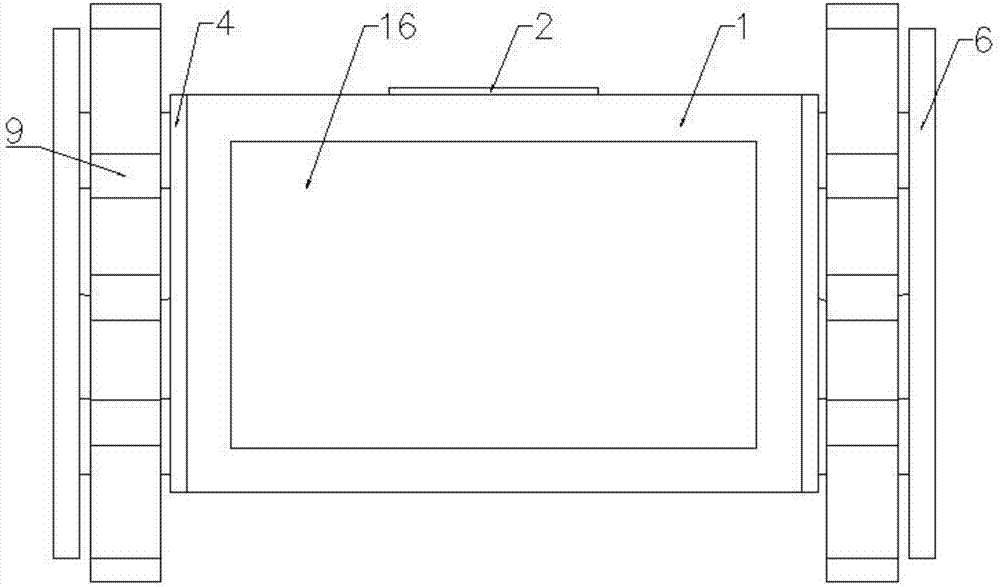
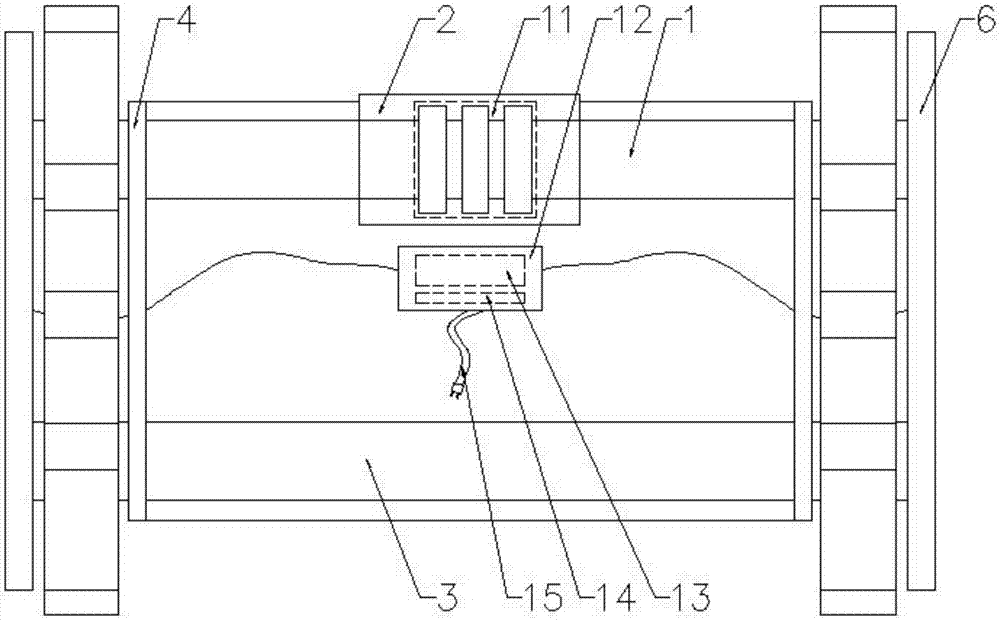
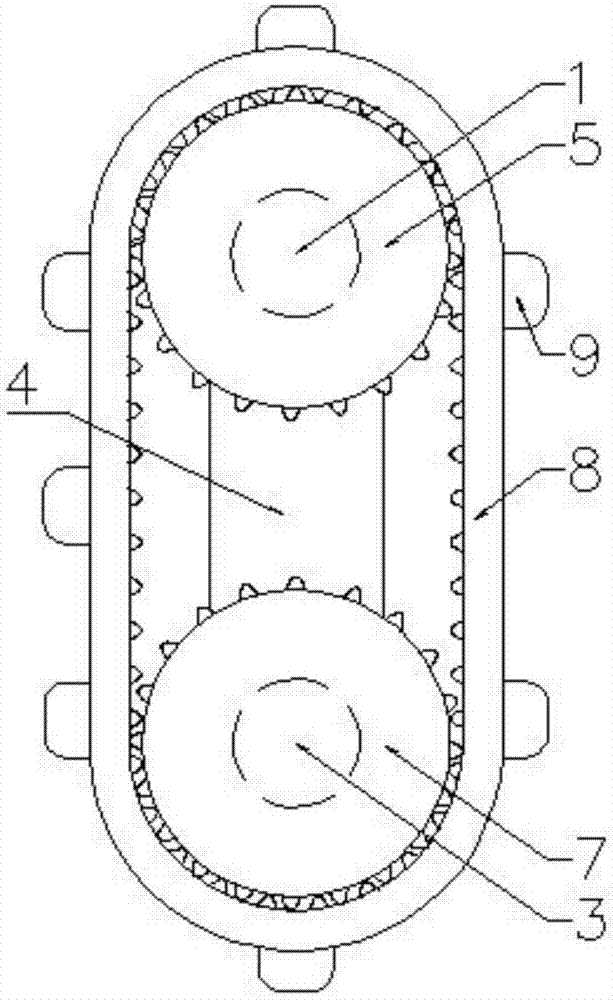
[0028] A green energy-powered stair-climbing robot in this embodiment includes a driving shaft 1, a rotating motor 2 and a driven shaft 3, and the two ends of the driving shaft 1 are sequentially provided with a fixed support plate 4, a main shaft gear 5 and a photovoltaic panel 6 from the inside to the outside. ; The two ends of the driven shaft 3 are sequentially provided with a fixed support plate 4, a driven gear 7 and a photovoltaic panel 6 from the inside to the outside; the upper end of the fixed support plate 4 and the upper end of the photovoltaic panel 6 are fixed on the driving shaft 1 through bearings, and the fixed support plate The lower end of 4 and the lower end of the photovoltaic panel 6 are fixed on the driven shaft 3 through bearings; the main shaft gear 5 and the driven gear 7 are connected through crawler belts 8, and the outer surface of the crawler belts 8 is equidistantly arranged with climbing contacts 9; between the fixed support plate 4 A multifuncti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com