An improved method for joint filtering of star sensor and gyroscope
A technology of joint filtering and star sensor, applied in the direction of combined navigator, etc., can solve the problem of re-convergence of the quaternion estimated value, and achieve engineering operability, continuous and high-precision attitude of the quaternion estimated value. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0041] The technical solutions of the present invention will be further described below in conjunction with the examples.
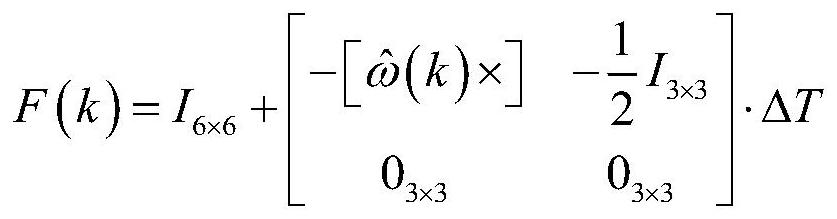
[0042] 1. Construct an extended Kalman filter
[0043] The projection ω of the three-axis angular velocity of the satellite body coordinate system relative to the inertial coordinate system in the satellite body coordinate system calculated according to the gyro measurement value s Can be expressed as follows:
[0044] ω s =ω+b+v g
[0045] In the above formula, b, v g are the constant drift and white noise of the gyro, respectively, and ω is the real three-axis angular velocity.
[0046] Calculate the measurement quaternion q of the inertial coordinate system relative to the satellite body coordinate system according to the measurement value of the star sensor s , which is the quaternion measurement of the extended Kalman filter algorithm. the q s with ω s are the two input quantities of the extended Kalman filter.
[0047] Estimation of attitu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com