Wearable pedestrian navigational positioning method and equipment based on human motion model aid
A technology for human movement and pedestrian navigation, which is applied to navigation, navigation, surveying and navigation through speed/acceleration measurement, and can solve problems such as easy fluctuations, difficulties in gait detection and resolution, and large heading errors in strapdown calculations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0101] 1. Analyze the gait of the human body and the inertial sensor output under different motion modes
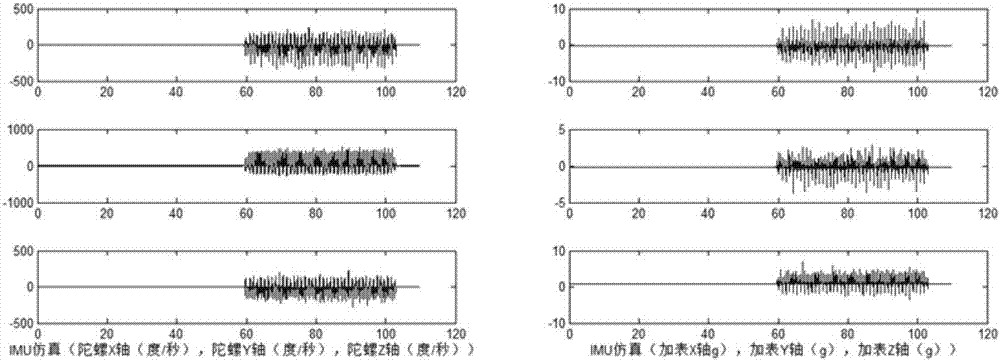
[0102] In the process of human body movement, both feet move alternately. Taking one of them as an example, the landing stage of the foot can be divided into four stages: lifting the foot, stepping, landing, and supporting. Place the inertial sensor device on the human foot, and it can be obtained by analyzing the output information of the inertial sensor, such as figure 2 As shown, the time when the foot is fully in contact with the ground is about 0.2-0.4 seconds, and zero-speed correction should be performed during this time period.
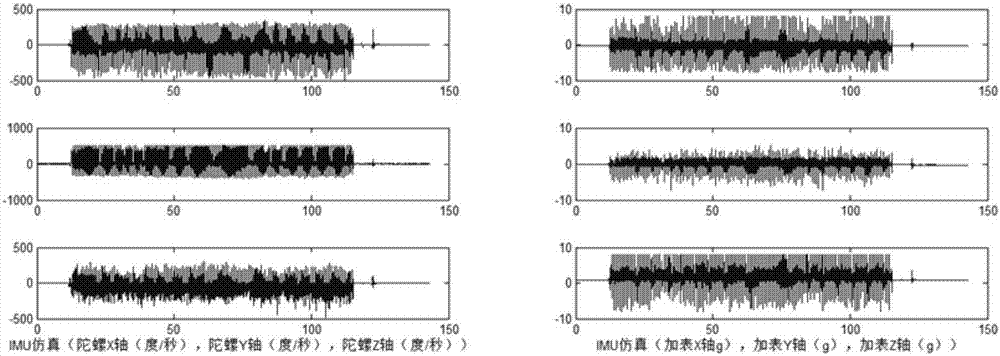
[0103] When the human body is running, both feet may leave the ground at the same time, and zero speed correction cannot be performed at this time. Analyze the inertial sensor output information in running mode, such as image 3 As shown, the information of the accelerometer and gyroscope changes more sharply, and the period of change ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com