Stepping type hybrid-drive flexible tree-climbing robot
A hybrid drive and step-by-step technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of poor versatility, slow movement speed, and small load capacity of trees with different diameters, and achieve safe, reliable and flexible output for tree climbing High, easy-to-control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0026] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings and embodiments. Obviously, this is only a part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without making creative efforts fall within the protection scope of the present invention.
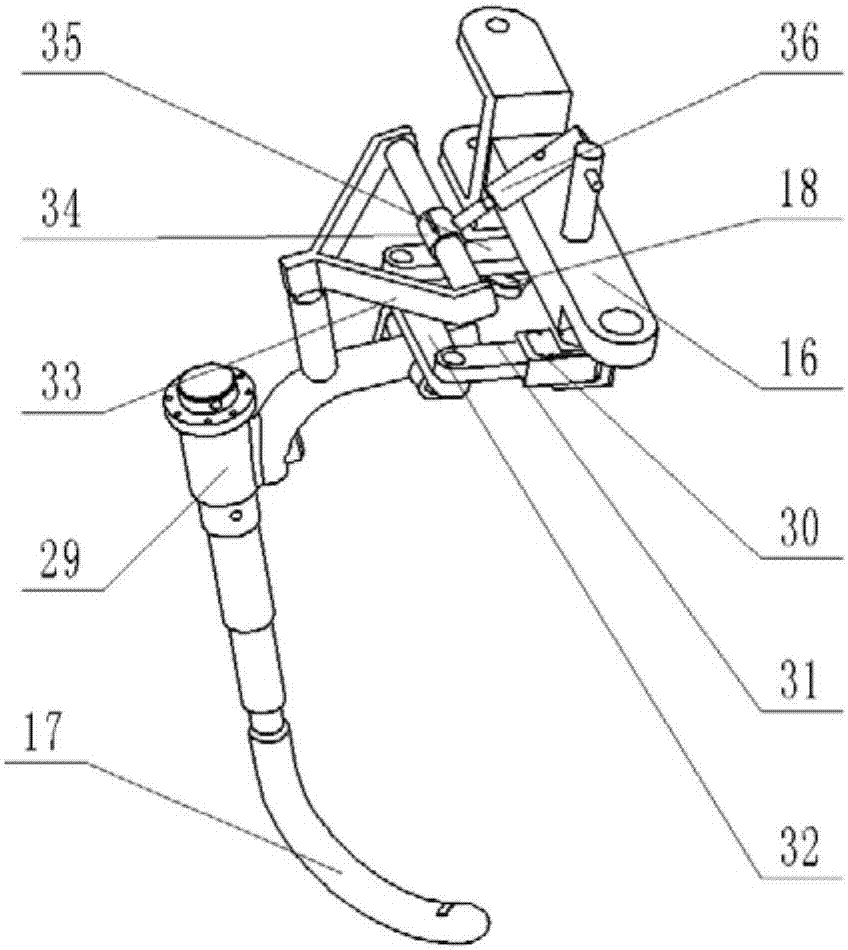
[0027] control figure 1 , figure 2 , Figure 8 with Figure 9 , the hybrid drive stepping metamorphic tree climbing robot described in the present invention includes a hybrid drive mechanical leg system and a frame rod assembly, and the specific structure and connection relationship are:
[0028] The hybrid drive mechanical leg system includes a first hybrid drive mechanical leg system, a second hybrid drive mechanical leg system, a third hybrid drive mechanical leg system and a fourth hybrid drive mechanical leg system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com