Grey-forecasting-model-based method for predicting weak fault degrees of autonomous underwater vehicle propeller
A gray prediction model and underwater robot technology, applied in underwater ships, underwater operation equipment, instruments, etc., can solve the problems of large prediction errors, achieve the effect of improving prediction accuracy and having adjustability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
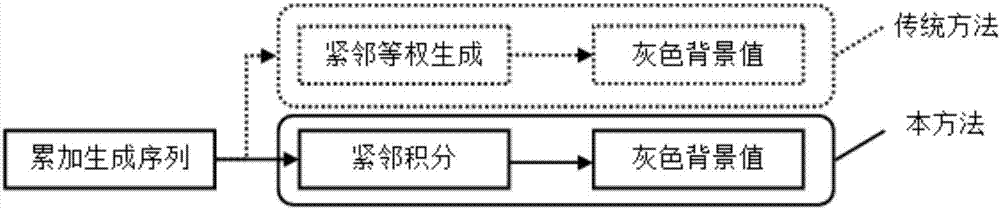
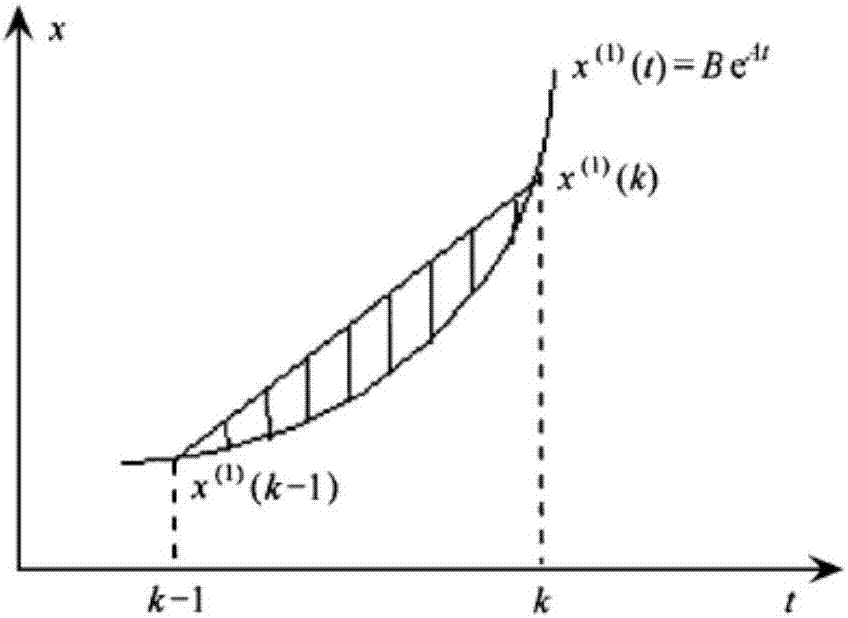
[0034] combine Figure 1 to Figure 8 , the method for predicting the degree of weak faults of autonomous underwater robot thrusters of the present invention is described. The method for predicting the degree of weak failure in the present invention is proposed for the problem that the prediction error is relatively large when the traditional gray GM (1,1) method is used to predict the degree of weak failure of the AUV thruster. The fault degree data is processed, and then the gray background value is constructed by using the sequence generated by accumulation; the gray prediction model is constructed based on the gray background value, and the whitening equation of the gray prediction model is solved; finally, after the second prediction of the obtained prediction sequence Get the final prediction sequence. Finally, the accuracy and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com