Unmanned vehicle navigation method for port container horizontal handling
A navigation method and container technology, applied in the field of navigation, can solve problems such as complex navigation methods and path conflicts, and achieve the effect of ensuring driving efficiency and reducing conflicts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
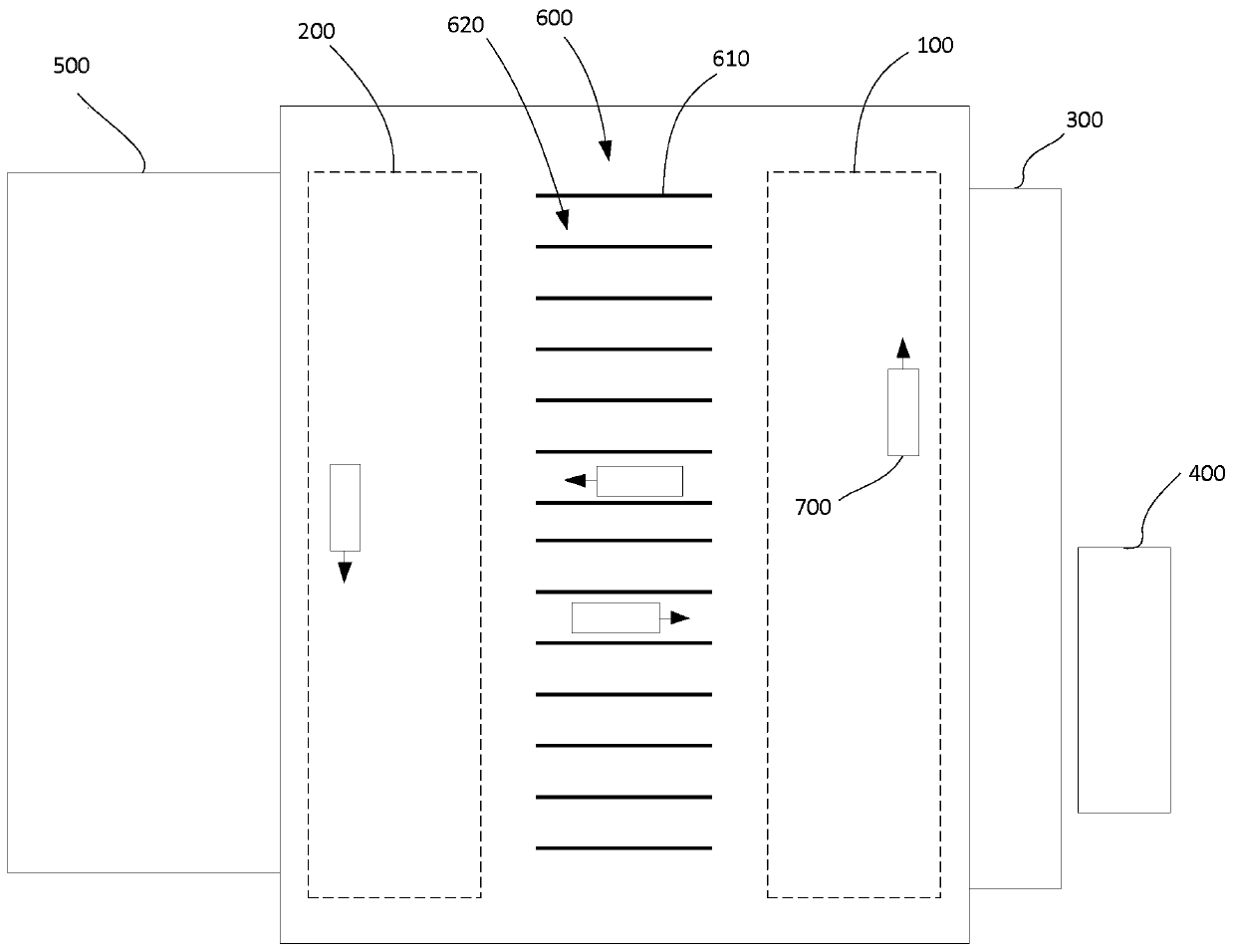
[0027] The port environment in the embodiment of the present invention is as figure 1 As shown, it includes a loading area 100 and an unloading area 200. The loading area 200 is close to the quay bridge 300, and the cargo ship 400 is docked beside the quay bridge. The unloading area 200 is close to the storage yard 500. A navigation area 600 is provided, and the navigation area 600 includes a plurality of mutually parallel navigation lines 610, adjacent navigation lines 610 form a navigation lane 620, and the port container horizontal handling unmanned vehicle 700 in the navigation lane 620 The driving direction of the port container horizontal handling unmanned vehicle 700 in the loading area 100 is perpendicular to the driving direction of the port container horizontal handling unmanned vehicle 700 in the unloading area 200 and the driving direction of the port container horizontal handling unmanned vehicle 700 in the loading area 100 The driving directions of the unmanned v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com