Method for planning quadruped robot foot end swinging track
A quadruped robot, foot-end technology, applied in the direction of instruments, non-electric variable control, attitude control, etc., can solve the problems of obstacle avoidance and obstacle-surmounting ability, so as to achieve obstacle-surmounting function, improve passing ability, and realize avoidance. the effect of dysfunction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] In order to better understand the present invention, the content of the present invention will be further described below in conjunction with the accompanying drawings and examples.
[0028] Step 1: Determine the swing span of the foot end and the duration of the swing phase
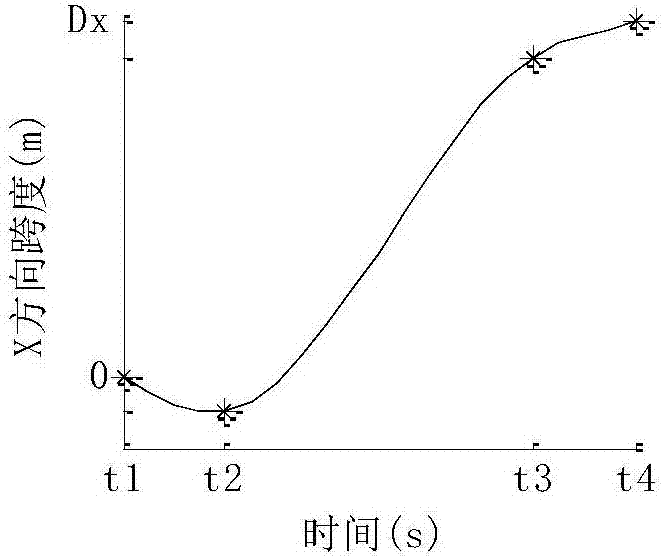
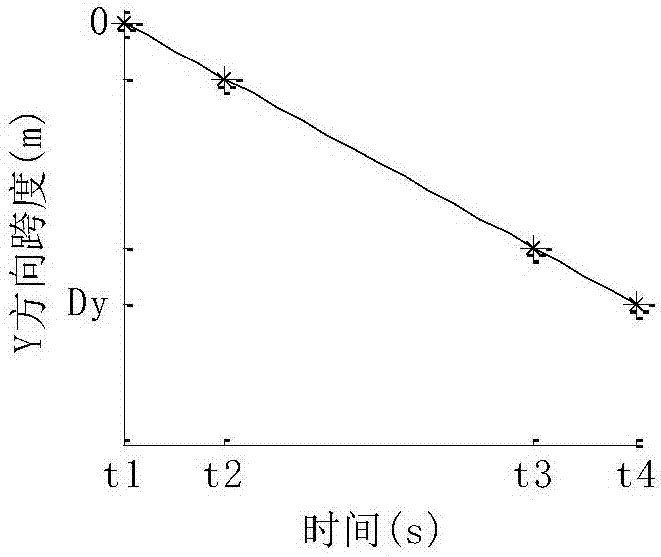
[0029] The swing span D of the foot end in the X, Y, Z three-dimensional directions is determined x ,D y ,D z , and the duration of the entire swing phase T sw .
[0030] Step 2: Design the state parameters of the curve endpoints during the foot swing process
[0031] Such as figure 1 As shown, the swinging process of the foot end is divided into three stages: raising the leg, stepping the leg and dropping the leg, and designing the state parameters of the curve endpoints in the three stages, including:
[0032] Step 21, divide the swinging process of the foot end into three stages: leg raising, leg stepping and leg dropping.
[0033] Step 22: P 1 P 2 In the stage of leg lifting, the foot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com