Multifunctional gripper
A grasping hand and multi-functional technology, applied in the field of grasping hand, can solve problems such as complex mechanical structure, and achieve the effect of exquisite structure, stable grasping and high utilization rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
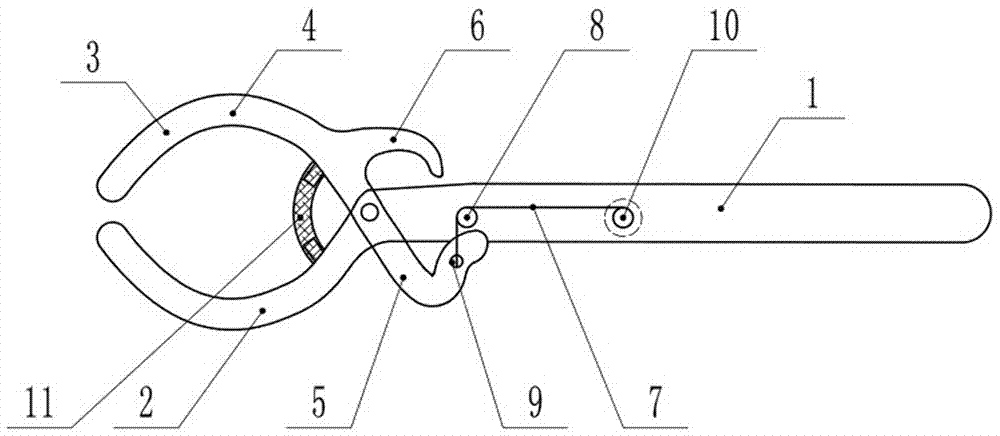
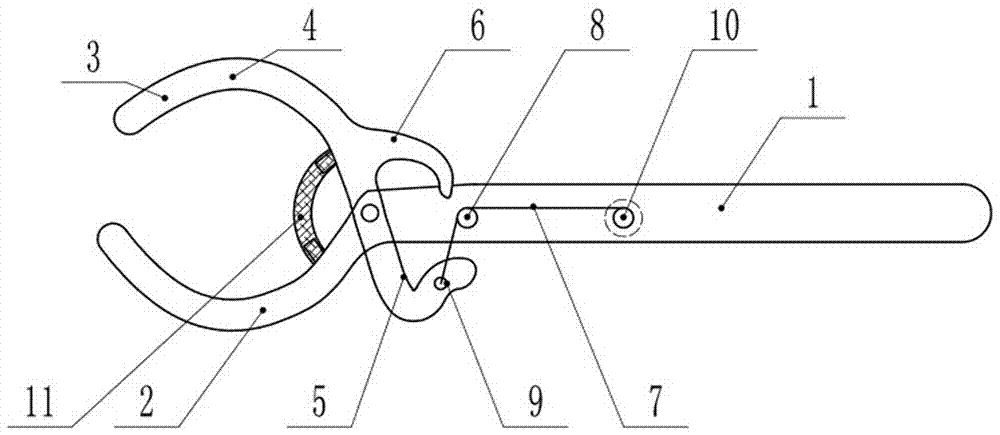
[0010] Such as figure 1 As shown, the multifunctional grabbing hand described in this embodiment includes a grabbing arm 1. The front end of the grabbing arm 1 is composed of an arc-shaped fixed mechanical finger 2 and a movable mechanical finger 3. The front ends of the two mechanical fingers form an open shape. Structure, the end of the fixed mechanical finger 2 is fixedly connected with the grabbing arm 1, the movable mechanical finger 3 is divided into two parts, the shape of the first part 4 of the movable mechanical finger 3 is symmetrical to that of the fixed mechanical finger 2, and the movable mechanical finger 3 The second part 5 is hingedly connected to the grabbing arm 1, and the end of the second part 5 of the movable mechanical finger 3 is bent toward the grabbing arm 1 and is provided with a connecting hole 9, and the middle part of the grabbing arm 1 is fixed with a drive motor 10 to drive A tension rope 7 is connected between the motor 10 and the connection ho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com