Inertial navigation cooperative localization method and localization equipment
A collaborative positioning and equipment technology, applied in road network navigators, navigation through speed/acceleration measurement, etc., can solve the problems of inconsistent inertial navigation positions and insufficient positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] For ease of understanding, the following first introduces the inertial navigation equipment and the basic calculation method of inertial navigation positioning in this application:
[0071] Inertial navigation equipment refers to mobile equipment with inertial navigation components that can realize inertial navigation positioning.
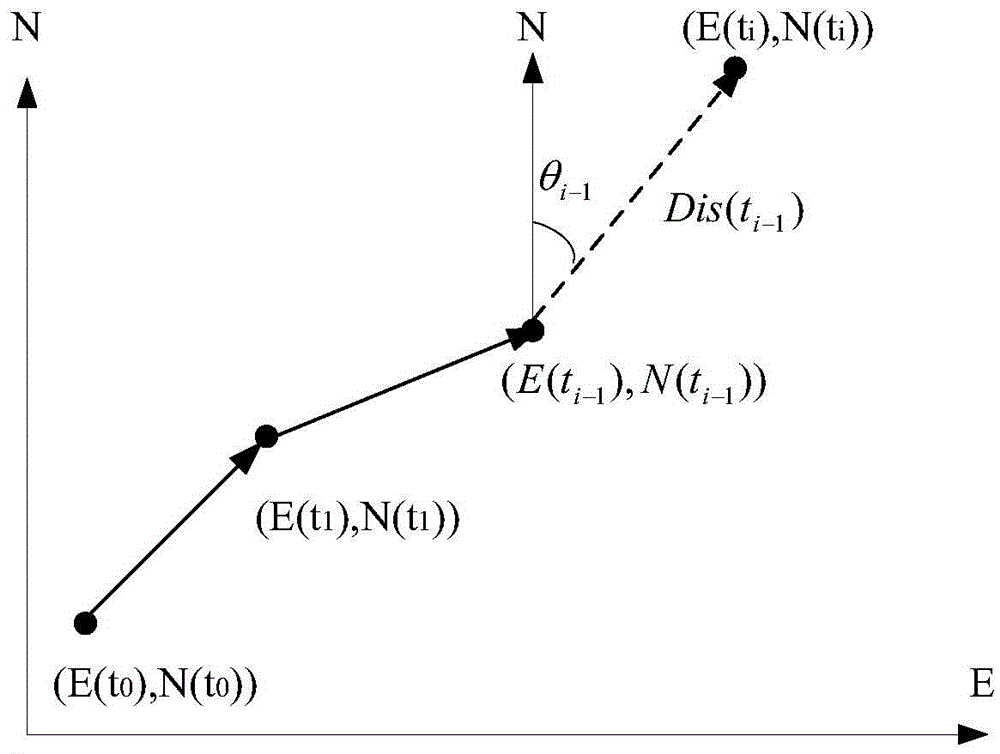
[0072] The basic calculation method of inertial navigation positioning is human dead reckoning method, please refer to figure 2 :
[0073] Taking N as the true north direction, E as the true east direction, and θ as the direction angle of the pedestrian track (obtainable through the gyroscope), it is assumed that the initial position of the mobile device is (E(t0), N(t0)), and the pedestrian steps The step distance is Dis (the walking speed and walking time are obtained by integrating the accelerometer), then the inertial navigation position at time i can be obtained as (E(ti), N(ti)), and the calculation formula is as follows:
[0074] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com