Improved RRT<*> obstacle avoidance motion planning method based on multi-degree-of-freedom mechanical arm
A motion planning, robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low convergence rate, easy to fall into stagnation, reduce search efficiency, etc., to improve the convergence rate, improve the convergence rate, save money The effect of search time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings and specific implementation methods. The embodiments of the present invention are implemented on the premise of the technical solutions of the present invention. The detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the scope of the following examples.
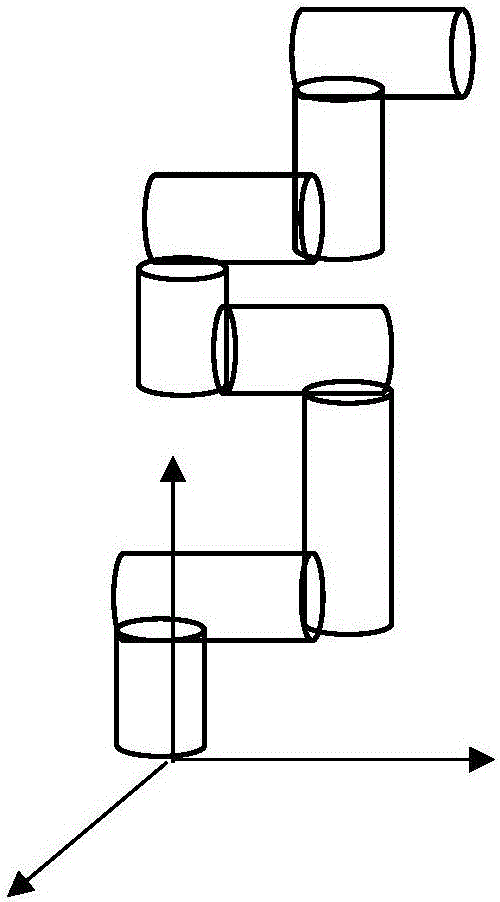
[0027] First build a robotic arm with seven linkages and six rotary joints, and select the two-finger gripper as the end effector, as shown in figure 1 The same (x0, y0, z0) is used as the base coordinate system, and the axis around which the other joints rotate is used as the z-axis, and the pose matrix at the end is calculated according to the DH parameter value Among them, A1 to A6 are the rotation matrices of each joint, and the angles of each joint in the target state are solved by inverse kinematics analysis
[0028] according to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com