System and method for simulating flight tracks of unmanned aerial vehicles on basis of GPS (global positioning system) simulation
A technology of flight trajectory and simulation system, applied in the field of unmanned aerial vehicles, can solve the problems that it is difficult to meet the rapid development of real-time simulation software, the code style and quality are uneven, and the real-time performance of code is not easy to guarantee, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] An embodiment of the present invention will be further described below in conjunction with the accompanying drawings.
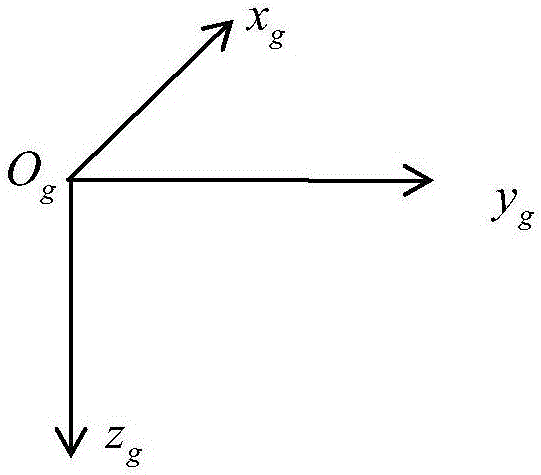
[0056] In the embodiment of the present invention, the ground coordinate system (ground axis system) S used g -O g x g the y g z g Such as figure 1 As shown, choose a point O on the ground g ;Find a coordinate axis x in the horizontal g Axis, fixed; z g The selection rule of the axis is: in the coordinate axis cluster pointing to the center of the earth, find a coordinate axis perpendicular to the ground as z g axis; y g The axis is found in the horizontal plane according to the right-hand rule;
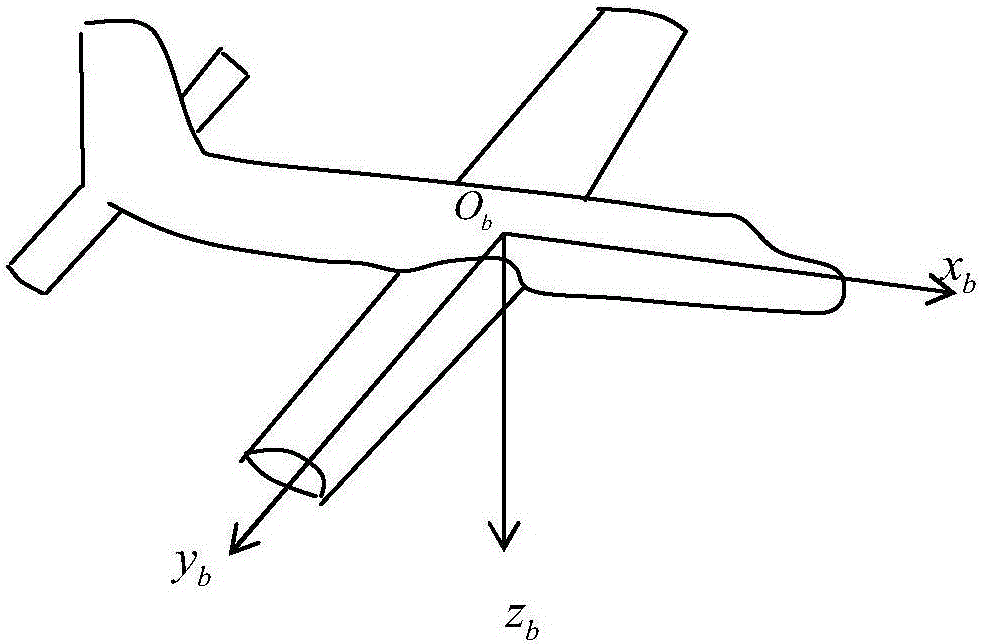
[0057] In the embodiment of the present invention, the adopted body coordinate system (body axis system) S b -O b x b the y b z b Such as figure 2 As shown, the origin O b Choose the center of mass of the aircraft, and the coordinate system moves with the aircraft; find a coordinate axis x on the plane of symmetry of the aircraft b , the coo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com