Hand movement tracking system and tracking method
A hand movement and tracking system technology, applied in the field of inertial navigation, can solve the problem of poor dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0112] The present invention will be further described below in conjunction with the accompanying drawings.
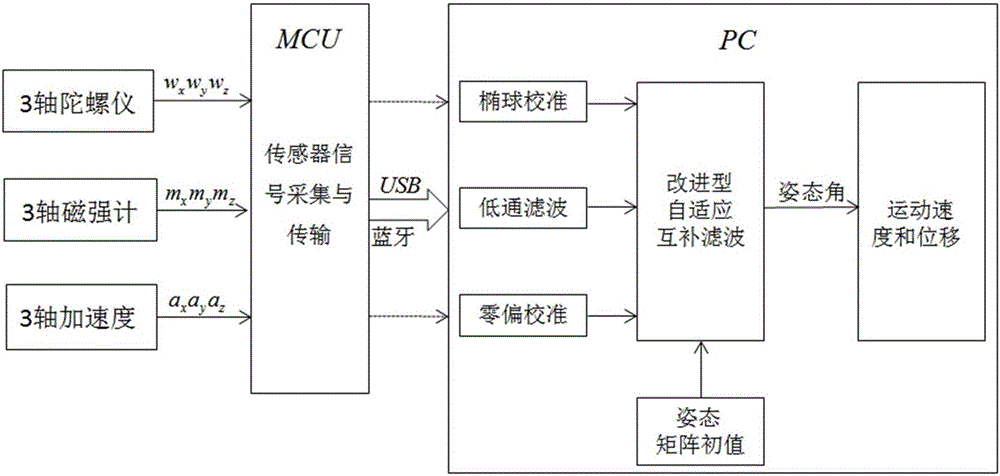
[0113] Such as figure 1 As shown, the technical implementation of the motion tracking method in the present invention specifically includes the following steps:
[0114] (1) The accelerometer measures the three-axis acceleration of the hand, the gyroscope measures the three-axis angular velocity of the hand, and the magnetic sensor measures the three-axis magnetic field component of the hand;
[0115] (2) The MCU receives the three-axis acceleration measured by the accelerometer, the three-axis angular velocity measured by the gyroscope and the three-axis magnetic field component measured by the magnetic sensor through the IIC bus, and sends them to the host computer;
[0116] (3) The upper computer first establishes an error model for the three-axis magnetic field component by the least square method to eliminate the magnetic field interference in the environment; se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com