Double-claw type obstacle-crossing direction-adaptive pipeline external detection robot
An adaptive and robotic technology, applied in the direction of special pipes, pipe components, mechanical equipment, etc., can solve the problems of self-adaptive adjustment ability of external detection robots, inability to detect oil and gas pipelines, pipeline bending, etc., to achieve obstacles and Adaptive adjustment ability, solving troubles and economic losses, and improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
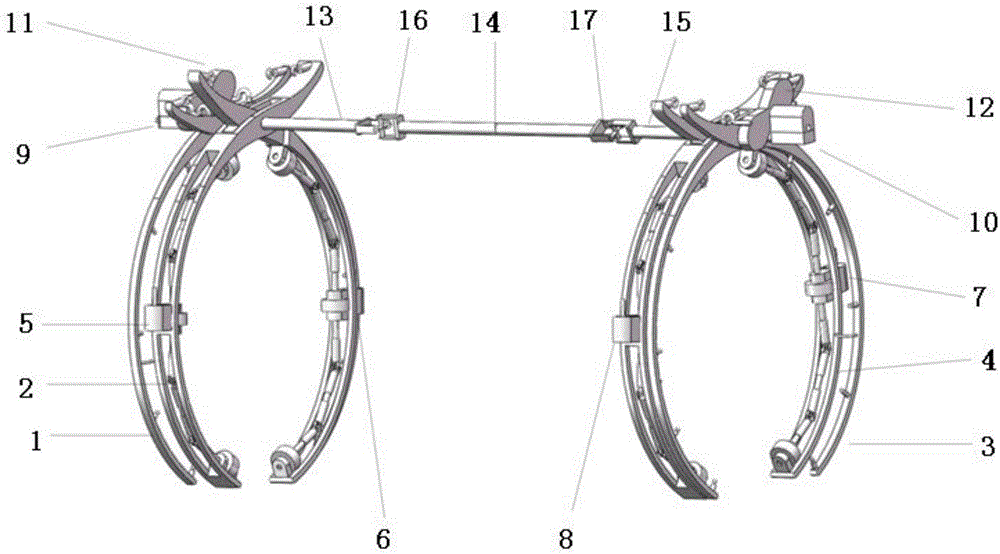
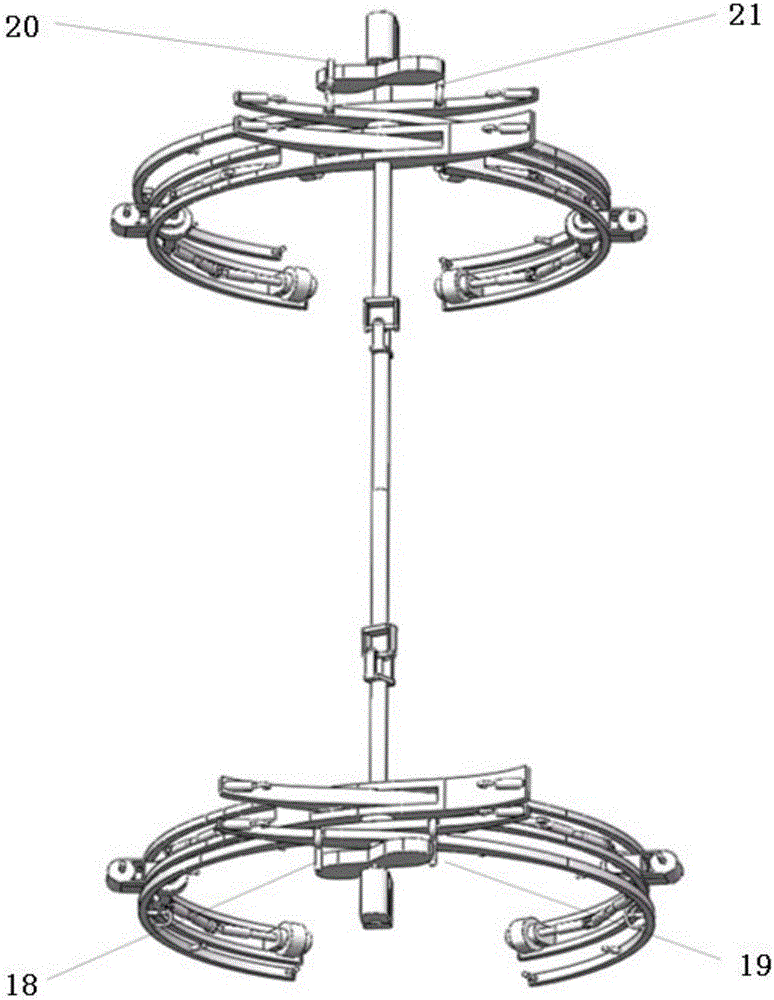
[0021] Such as figure 1 , figure 2 As shown, the present invention provides a double-claw type obstacle-crossing direction adaptive detection robot outside the pipeline, which is composed of a mechanical system and a circuit system, and the mechanical system is controlled by the circuit system. The mechanical system includes a pipe grasping mechanism, a connecting device and a driving device. The pipe grasping mechanism is arranged on the connecting device, and the driving device is connected with the pipe grasping mechanism. The driving device drives the pipe grasping mechanism to act under the control of the circuit system.
[0022] The gripping mechanism includes a first mechanical claw 1 , a second mechanical claw 2 , a third mechanical claw 3 and a fourth mechanical claw 4 . Among them, the first to fourth do not represent the order of install...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com