A Teleoperation System for Space Robot Based on 3D Gesture
A space robot, operating system technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as hindering the operator's hand movements, and achieve the effect of increasing the presence experience and improving safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
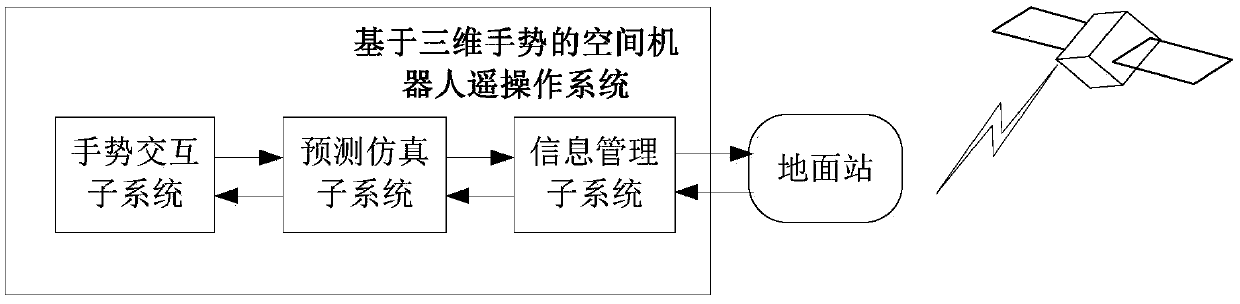
[0091] system software
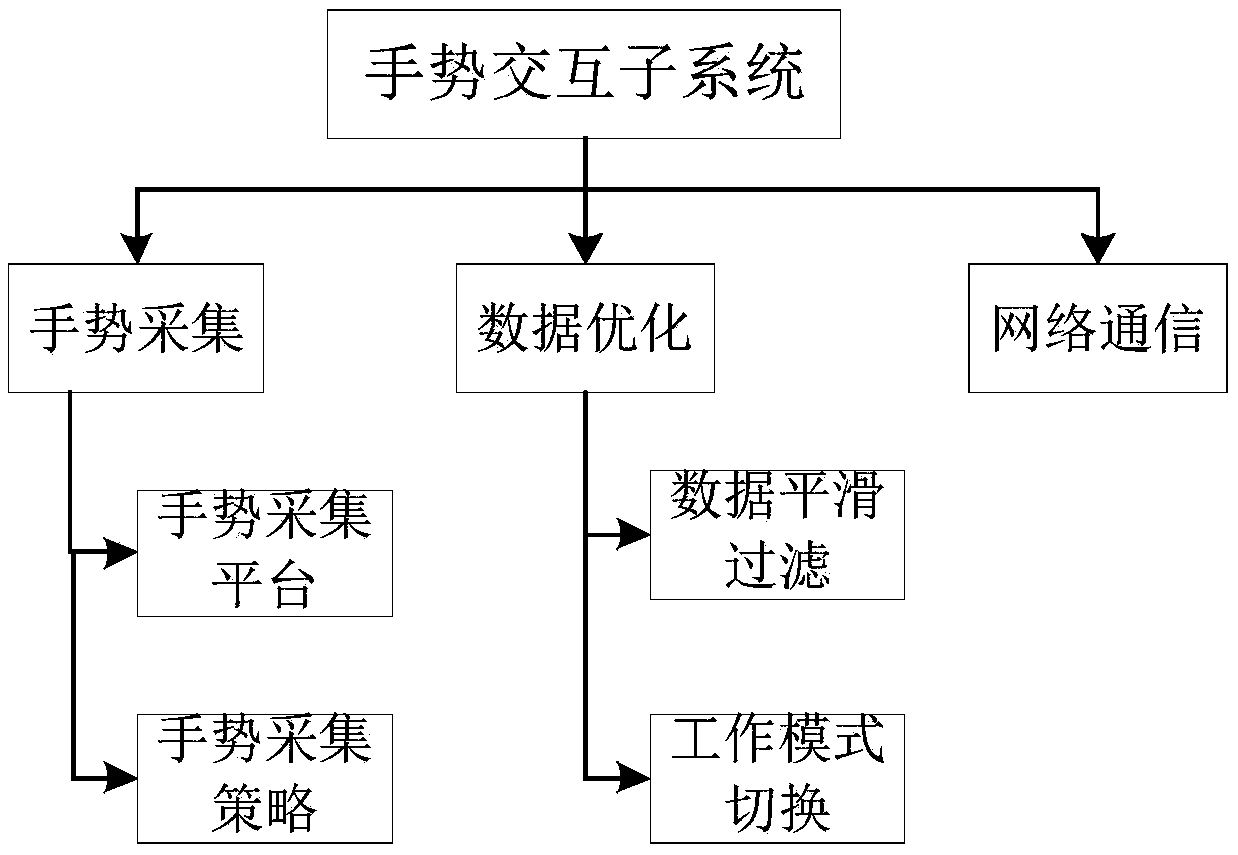
[0092] a gesture interaction subsystem software
[0093] Gesture interaction subsystem software includes gesture acquisition software and gesture processing software. The gesture acquisition software runs on a tablet computer in one copy, connects with Leap Motion, and runs on Windows 7 operating system and leap SDK software driver environment. Gesture processing software in one copy, running on Windows 7 operating system and OpenScenegraph software support environment.
[0094] b predictive simulation subsystem software
[0095] The predictive simulation subsystem software runs in a separate computer in one copy, and performs simulation based on OpenSceneGraph, including 3D display function, fast collision detection algorithm library, collision detection, safety warning, dynamics simulation and other modules. The software is programmed based on OpenGL and MFC software library and runs on Windows 7 operating system.
[0096] c information managemen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com