Mechanical arm
A technology of manipulators and manipulator claws, applied in the field of robotics, can solve the problems of unilateral force, time-consuming, inaccurate opening size, etc., and achieve the effects of reduced processing amount, convenient operation and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
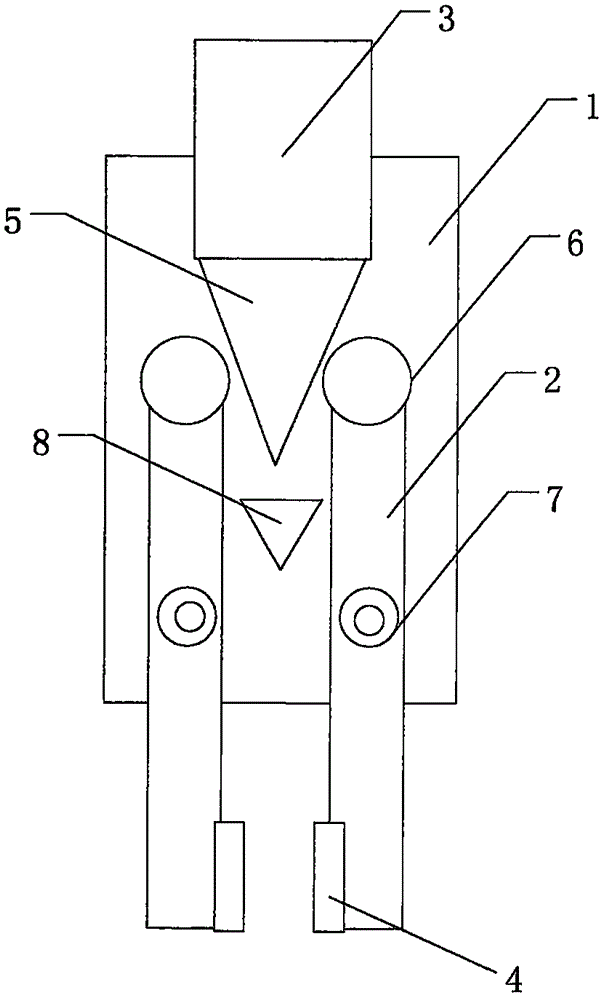
[0009] Such as figure 1 As shown, a manipulator is characterized in that it includes a base 1, a manipulator claw 2, and a push rod 3. There are two manipulator claws 2, and the middle of the manipulator claw 2 is pivotally connected to the base 1 and The two manipulator claws 2 are arranged symmetrically, and the lower end of the manipulator claw 2 has a clamping portion 4 for clamping the workpiece; the upper end of the manipulator claw 2 is in contact with one end of the push rod 3; the push rod 3 is a slender cylinder, one end of which is a conical structure 5, and the other end is connected to a power mechanism (not shown in the figure). The power mechanism adjusts the opening and closing of the manipulator claw 2 through the conical end of the push rod 3 .
[0010] Preferably, the clamping portion 4 of the manipulator claw 2 is a flat surface or a serrated surface.
[0011] Preferably, the upper end of the manipulator claw 2 is further provided with a bearing 6; the bearing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com