Plan method for rapid coverage track search coordinated by multiple UAVs (Unmanned Aerial Vehicles)
A track planning and multi-UAV technology, applied in three-dimensional position/course control, non-electric variable control, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0114] Four different scenarios are used to illustrate the feasibility and the effectiveness of the algorithm of a multi-UAV cooperative fast coverage search track planning method disclosed in this embodiment. The types and numbers of targets in Scenario 1 to Scenario 4 gradually increase, and the specific types and numbers are shown in Table 2.
[0115] Table 2 Description of the four scenarios
[0116]
[0117] Step 1, the covering search track of the point-line-plane special target.
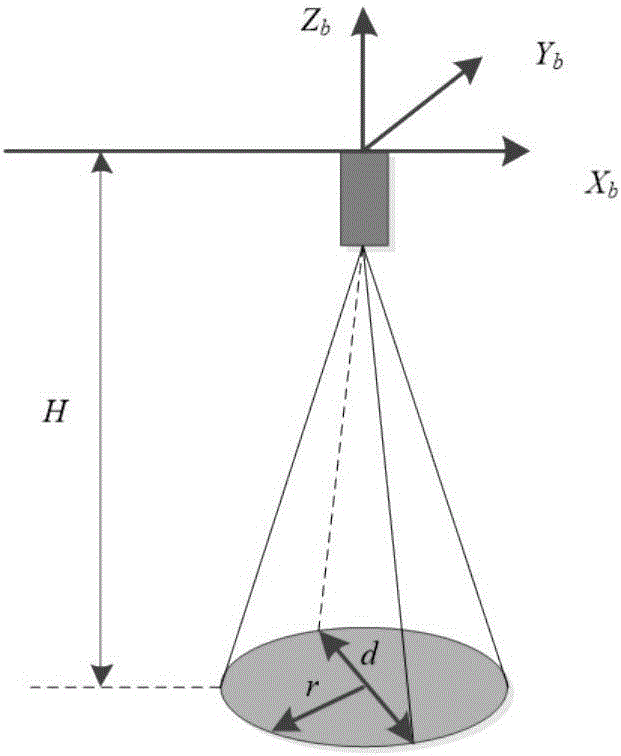
[0118] The ground field of view of the UAV seeker is affected by its flight altitude, attitude angle, and installation angle of the seeker. The UAV is regarded as a particle, and the ground field of view of the seeker is assumed to be circular and located at the front of the UAV. Below, the drone flies at a fixed altitude and its field of view on the ground is not affected by attitude angles and terrain undulations. Based on this, the UAV field of view model is established as figure 1 s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com