PTZ control method and device
A technology of control device and pan/tilt, which is applied in control system, motor generator control, TV, etc. It can solve the problems of monitoring scene deviating from the target area of monitoring, motor out of step, and no solution proposed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
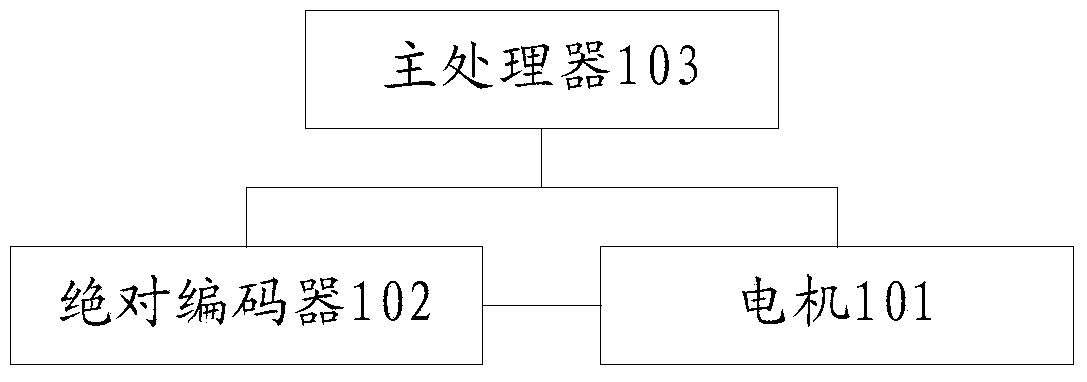
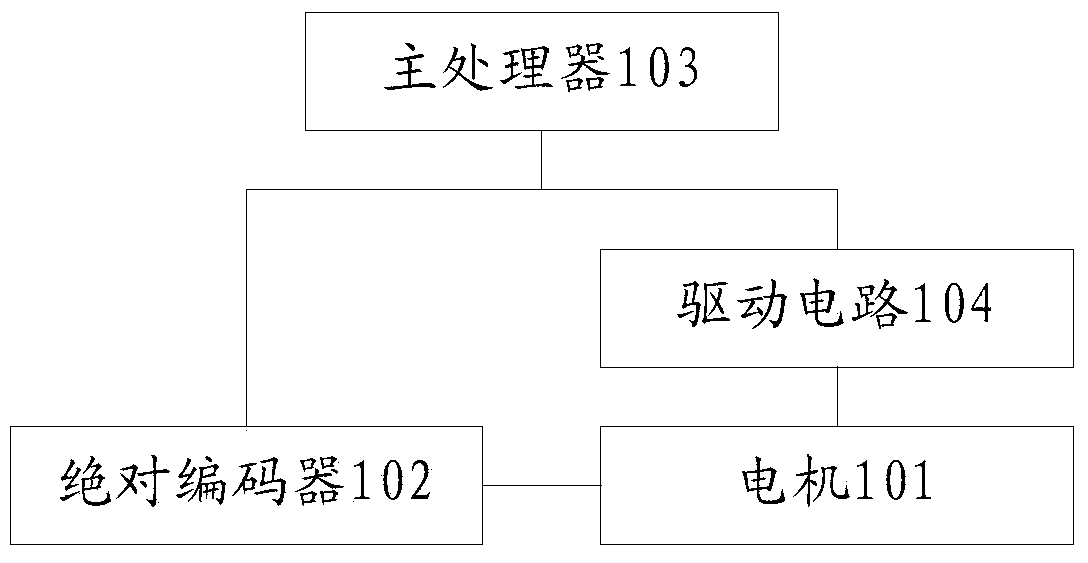
[0022] figure 1 A pan-tilt control device provided in this embodiment, such as figure 1 As shown, the motor 101 for controlling the rotation of the pan / tilt is included, and the device also includes:
[0023] The absolute encoder 102 is used to obtain the initial position information of the pan / tilt head, and obtain the real-time position information of the pan / tilt head after the motor performs a control action.
[0024] Wherein, the control action includes: controlling the motor to rotate or stand by.
[0025] It should be noted that the absolute encoder can be a Hall sensor or a photoelectric encoder, which can detect the angular displacement of the motor at 360 degrees. The absolute encoder can collect the initial position information and real-time information of the motor according to the acquisition signal of the main processor. Position information, and send the acquired real-time position information and initial position information to the main processor. The motor in this em...
Embodiment 2
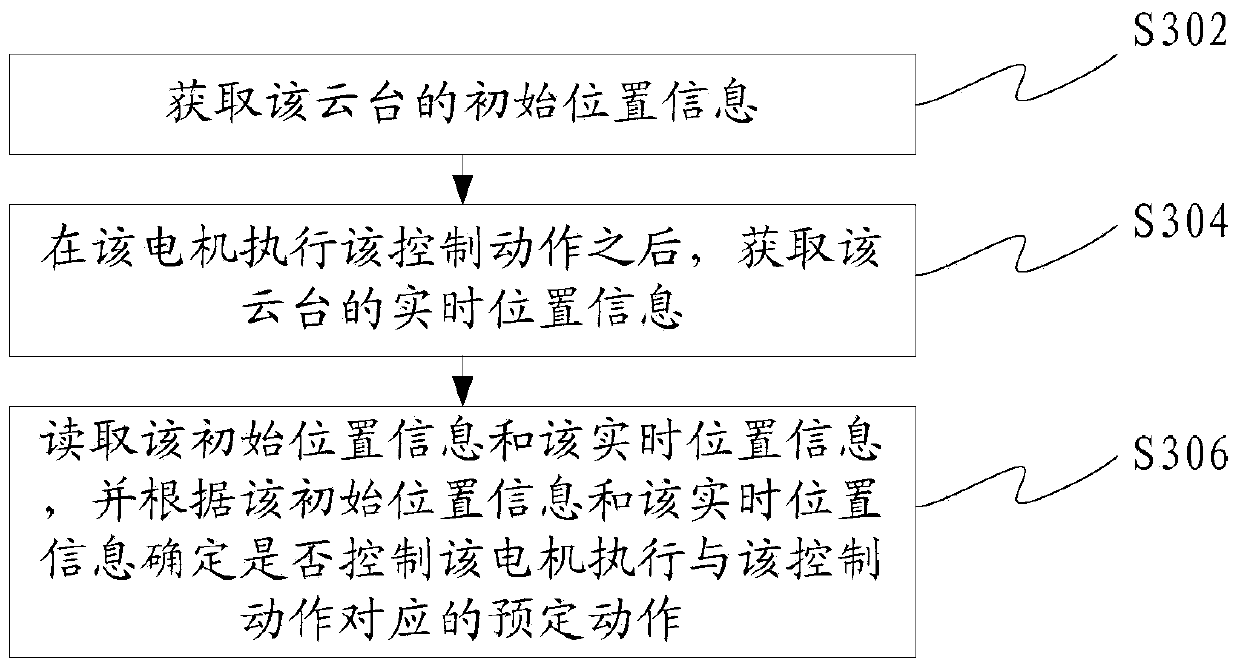
[0049] image 3 It is a method of controlling the PTZ according to this embodiment, such as image 3 As shown, the execution subject of this embodiment may be the above Figure 1 to Figure 2 The described PTZ control device, the method includes:
[0050] Step S302: Acquire the initial position information of the pan-tilt.
[0051] Step S304: After the motor executes the control action, obtain real-time position information of the pan / tilt.
[0052] Wherein, the control action includes: controlling the motor to rotate or stand by.
[0053] Step S306: Read the initial position information and the real-time position information, and determine whether to control the motor to perform a predetermined action corresponding to the control action according to the initial position information and the real-time position information.
[0054] It should be noted that the initial position information in this embodiment can be the position information after the motor is powered on, or it can be the po...
Embodiment 3
[0070] Figure 4 Is a PTZ control method provided according to this embodiment, such as Figure 4 As shown, the method includes the following steps:
[0071] Step S401: The pan / tilt control device receives the control signal, and controls the motor to execute the control action corresponding to the control signal.
[0072] Wherein, the control action includes a standby action or a rotating action.
[0073] When the motor performs a standby action, perform steps S402 to S405;
[0074] When the motor performs a rotating action, steps S406 to S410 are executed.
[0075] Step S402: The pan / tilt control device obtains the initial position information of the motor at the initial moment of standby.
[0076] Step S403: The pan / tilt control device obtains real-time position information of the motor after performing the standby action.
[0077] Step S404: The pan / tilt control device determines that the difference between the real-time position information and the initial position information of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com