Control system for gantry truss robot and control method for control system for gantry truss robot
A truss robot and control system technology, applied in the direction of load hanging components, transportation and packaging, etc., can solve the problems of insufficient functional practicability and stability, unfavorable long-term use, singleness, etc., to improve stability and prolong service life , to avoid the effect of using wear
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
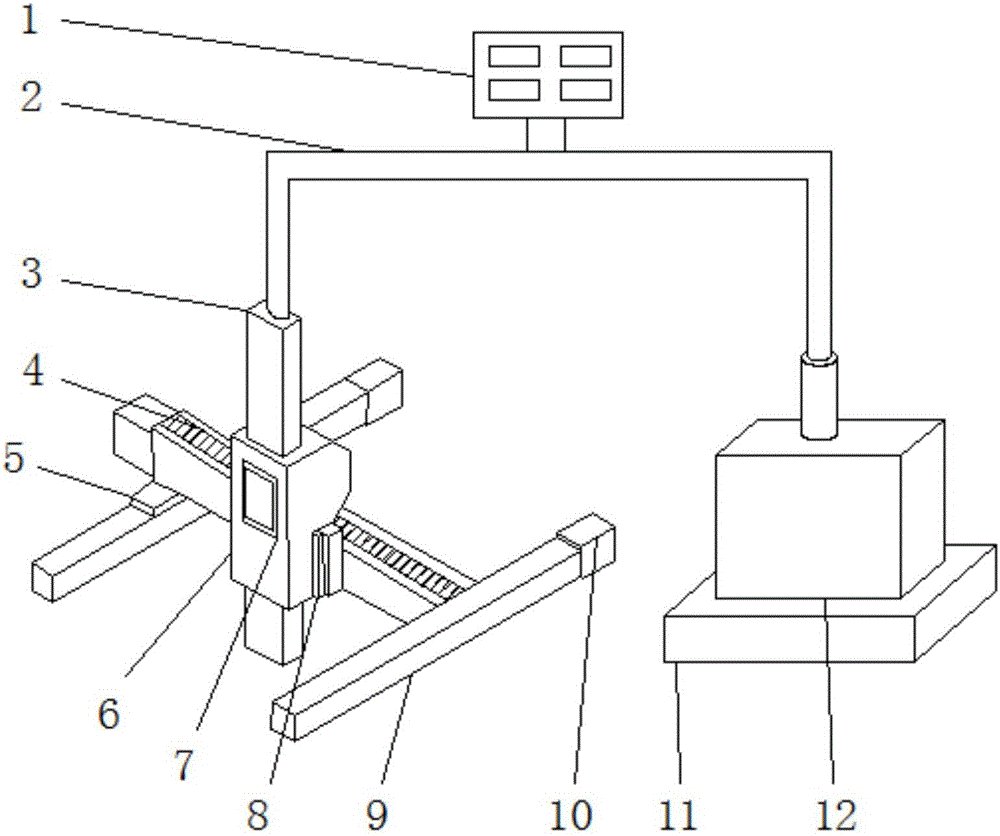
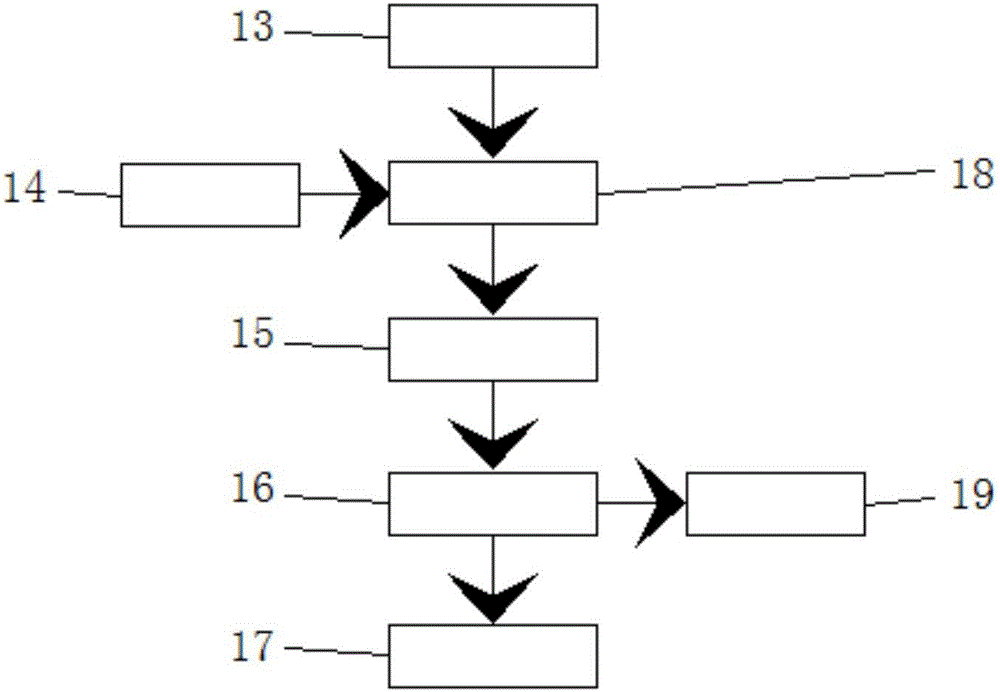
[0021] refer to Figure 1-2 , a control system for a gantry truss robot, comprising a body 6, an X-axis 9, an instruction processing module 16 and an instruction positioning module 18, a display screen 7 is installed on the front surface of the body 6, an X-axis 9 is installed on the right side of the body 6, and the X-axis 9 The Y axis 4 is installed on the right side, and the shaft spacer 5 is installed below the Y axis 4, the transmission device 8 is installed on the right surface of the body 6, the Z axis 3 is installed above the body 6, and the controller 1 is installed above the Z axis 3 A base 11 is installed on the right side of the X-axis 9, and a power devi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com