Swarm-robot mixed search method based on biological foraging behavior
A hybrid search and group robot technology, applied in the field of robotics, can solve problems such as complex structure, poor effect, and poor flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
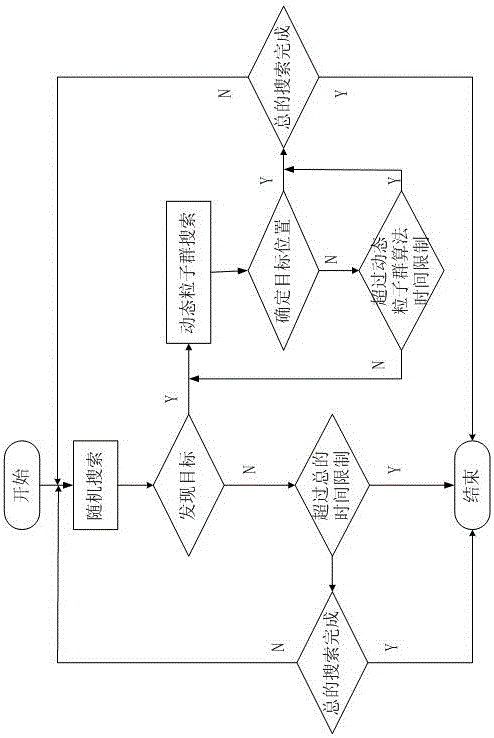
[0046] The steps of the present invention are:
[0047] Step 1: Use the grid method to model the search environment:
[0048] search area , , divided into several grids,
[0049] , : The search area is a rectangle, is the length of the search region, is the width of the search area.
[0050] Step 2: Divide the search area into several sub-areas:
[0051] Use A to denote the entire search area, use Represents any sub-area that is divided, then the entire search area can be expressed as: , n: the number of sub-areas divided into the search area.
[0052] Step 3: Arrange the search order of each sub-area:
[0053] The search order of each sub-region is determined by the size of the regional utility function, so that the sub-region with a strong target signal concentration is searched first. The regional utility function is as follows:
[0054]
[0055] , : coefficient in the formula, 0 , 1, take the value according to the search environment and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com