Array telescopic mechanical arm kiwi fruit picking up robot
A picking robot and telescopic technology, used in picking machines, agricultural machinery and implements, harvesters, etc., can solve the problems of high labor intensity, high cost and low efficiency, and achieve the effect of ensuring quality and improving efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solution of the present invention will be further elaborated below in conjunction with the accompanying drawings.
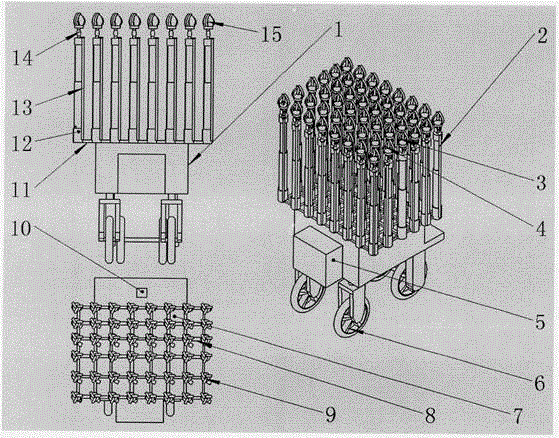
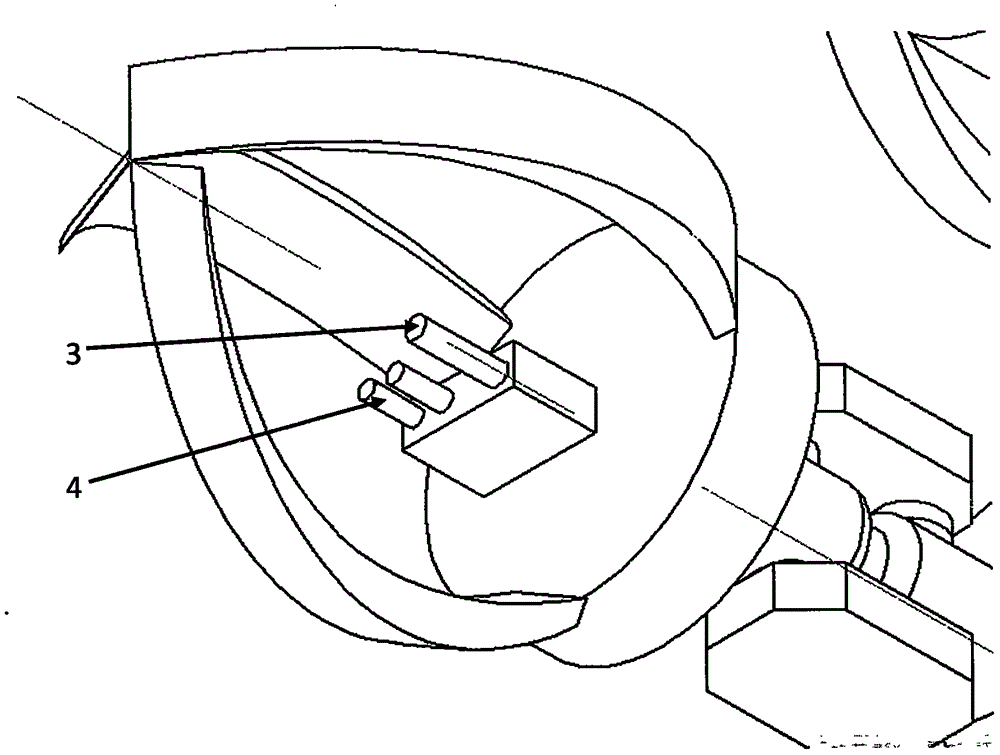
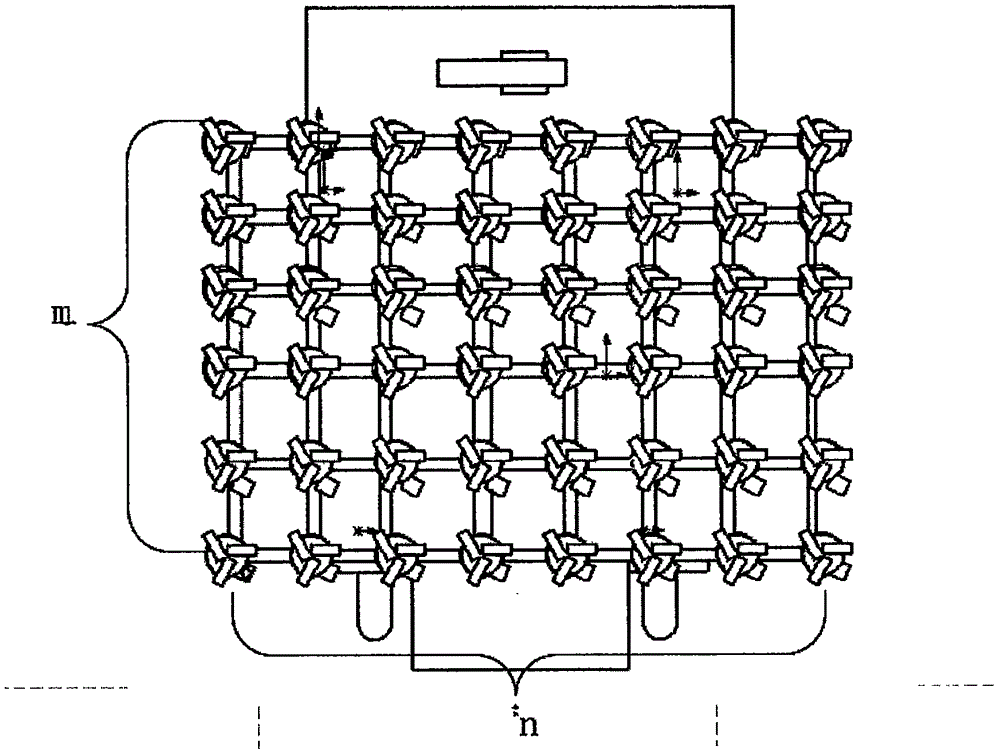
[0025] The robot for picking kiwi fruit of Avalokitesvara according to the present invention includes a mechanical execution system and a control system, and is characterized in that a plurality of retractable mechanical arms are distributed in an m×n array on the picking car body (1) to pick kiwi fruit. Carrying out identification, location, picking, described car body (1) structure is cabinet type, and two universal wheels (6) are installed on two corners behind its bottom and are used for changing walking direction, and car body (1) rear A traveling drive motor and a control system box (5) are provided, and the mounting frame (8) of the m×n array type telescopic mechanical arm is fixed on the vehicle body (1) by welding, and the rotation of the telescopic picking mechanical arm (2) Base (11) is directly welded on the car body (1), and its ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com