UUV (unmanned underwater vehicle) trace tracking method based on dynamic sliding mode control
A trajectory tracking and sliding mode technology, which is applied in non-electric variable control, height or depth control, control/regulation system, etc., can solve the complex expression of control law, the influence of real-time control system, and the inability to realize UUV real-time trajectory tracking, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with the accompanying drawings.
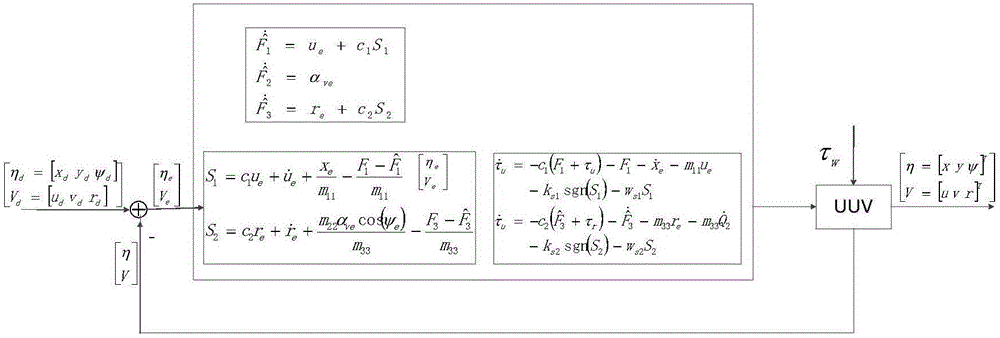
[0054] This patent proposes a new UUV dynamic sliding mode trajectory tracking control design method, which mainly includes the following contents:
[0055] A mathematical model of the underwater unmanned vehicle is established.
[0056] The error variable is obtained through coordinate transformation, and the derivative of the error variable is obtained by deriving the error variable.
[0057] The Lyapunov function is constructed, the virtual velocity is used to replace the control strategy of the attitude error, and the virtual velocity control variable is defined to transform the attitude tracking into the virtual velocity control.
[0058] Stabilize the virtual speed control variable, use the sliding mode control method to adaptively estimate the inaccurate system parameters and external time-varying disturbances, and establish the sliding mode dynamic function
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com