Robot functional module granularity division evaluating method based on D-S evidence theory
A technology of functional modules and evidence theory, which is applied in the field of granularity division and evaluation of robot function modules based on D-S evidence theory, and can solve the problems of less research on the evaluation of various module division schemes and decision-making criteria
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0078] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
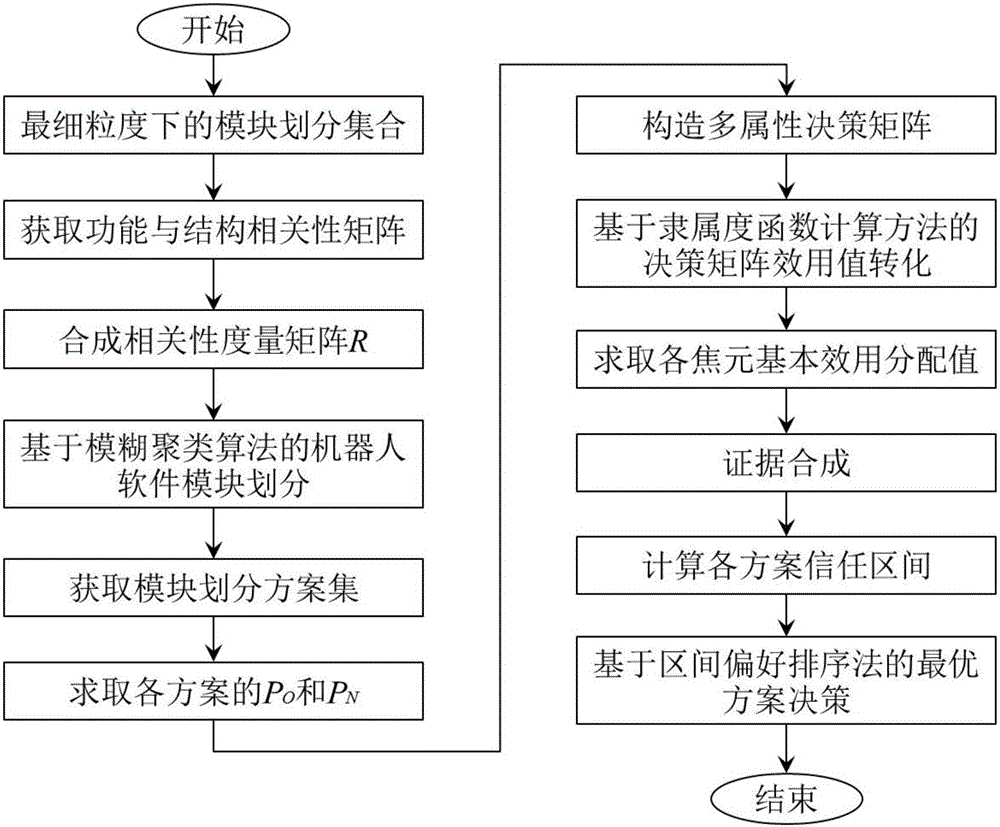
[0079] The invention realizes the granularity division of the functional modules of the robot control system on the basis of the fuzzy clustering algorithm, and proposes a granularity division evaluation method based on the D-S evidence theory for the optimization problem of the divisional granularity. The flow chart of the method involved is attached figure 1 As shown, the specific implementation process is divided into the following steps:
[0080] Step 1: Divide the functional modules of the intelligent service robot system according to the basic functions and structures, and then obtain the most fine-grained module set.
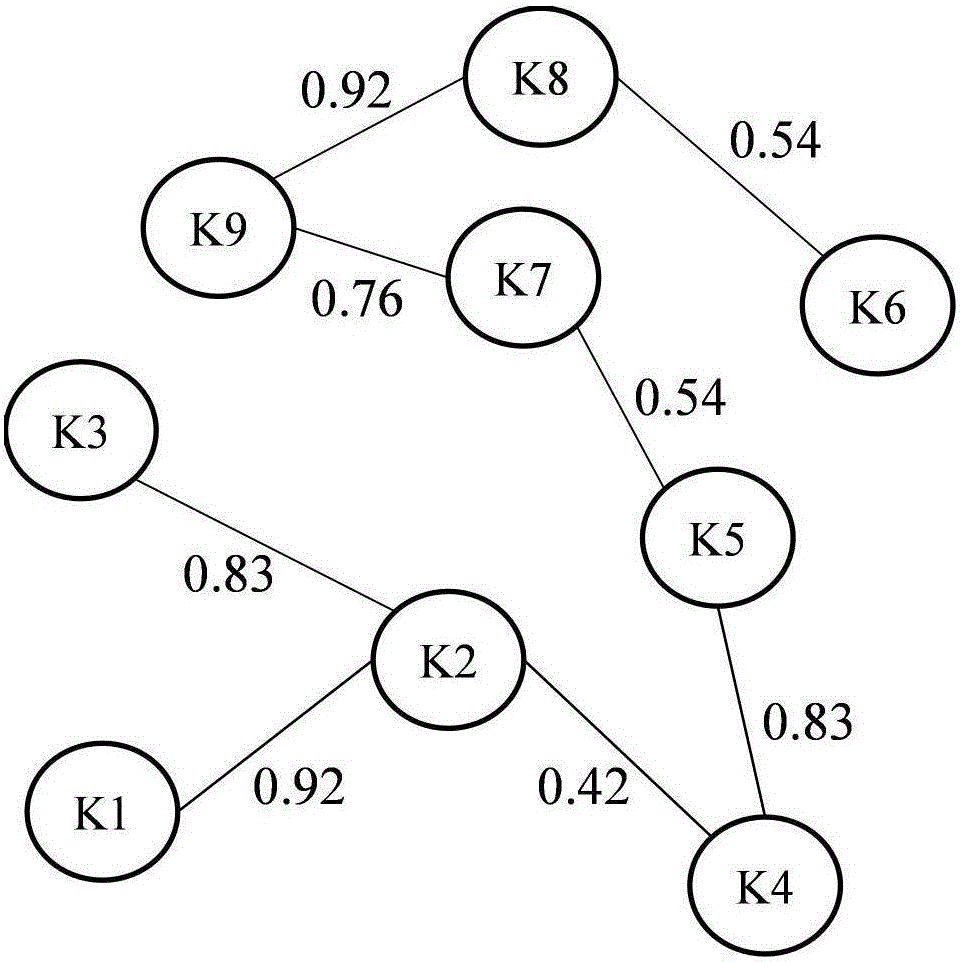
[0081] Step 2: Refer to Table 6 to conduct a pairwise analysis of the elements in the module set to obtain the functional correlation matrix and structural correlation matrix of the functional modules of the robot system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com