An automatic sorting system for domestic waste
An automatic sorting system and domestic garbage technology, applied in sorting and other directions, can solve problems such as difficult to meet the use requirements, low efficiency, complex and harsh environment for general household garbage, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] Below, at first several coordinate systems involved in the present invention are described:
[0083] ●Image coordinate system
[0084] The image coordinate system describes the position coordinates of a single pixel in the entire image. The origin of the coordinate system is set at the pixel point in the upper left corner of the image. The coordinates are (0, 0). The horizontal axis of the image coordinate system is the horizontal direction. The maximum value is 1600. The vertical axis is the vertical direction, and the maximum value is 1200, that is, the image width is 1600×1200.
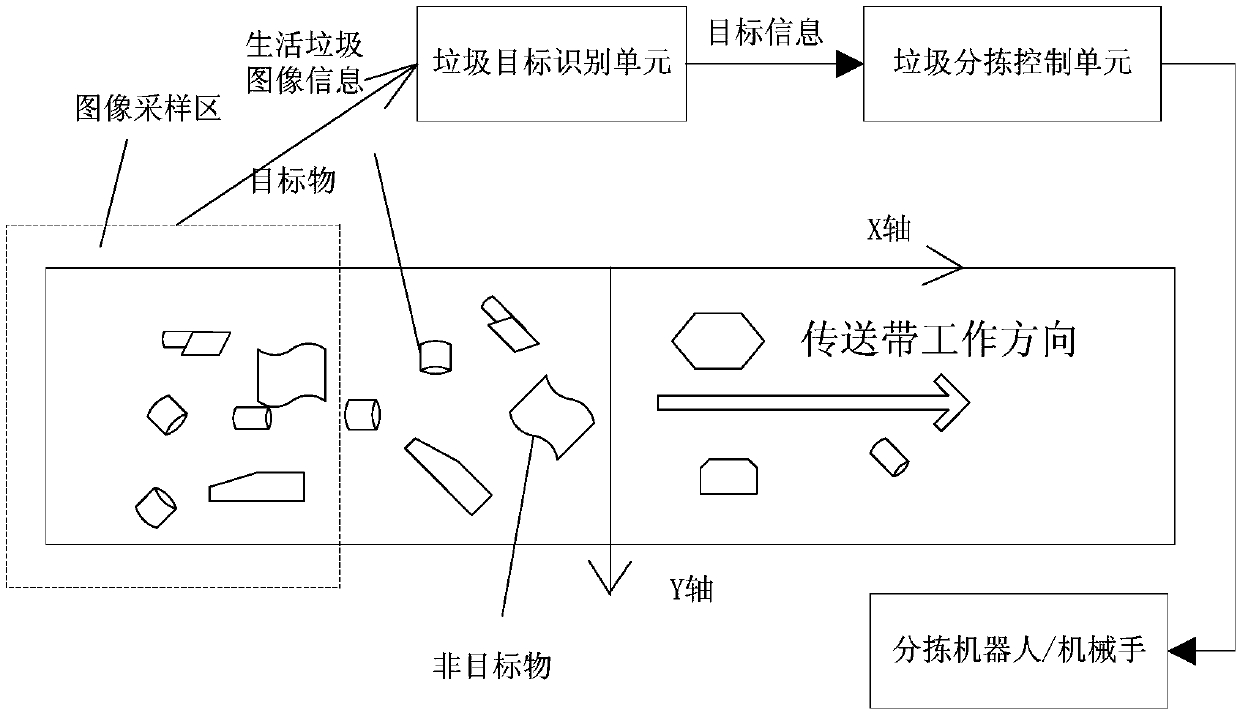
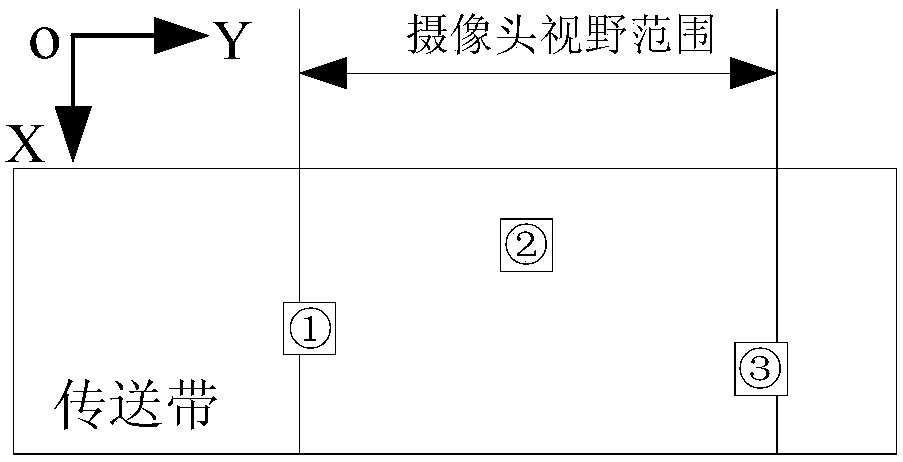
[0085] ●Conveyor belt plane coordinate system
[0086] The origin of the plane coordinate system of the conveyor belt is a fixed point O on the edge of the conveyor belt C , X C Axis is the direction of motion along the conveyor belt, Y C at the plane of the conveyor belt and with X C axis vertical.
[0087] ●N manipulator coordinate systems
[0088] The manipulator coordinate system ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com