Vision following control method of robot and robot
A technology of following control and robots, applied in the field of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The specific implementations of the constant pressure tensioning device and the crawler robot according to the present invention will be described with reference to the accompanying drawings. The following detailed description and accompanying drawings serve to illustrate the principles of the present invention. The present invention is not limited to the described preferred embodiments, but the scope of the present invention is defined by the claims.
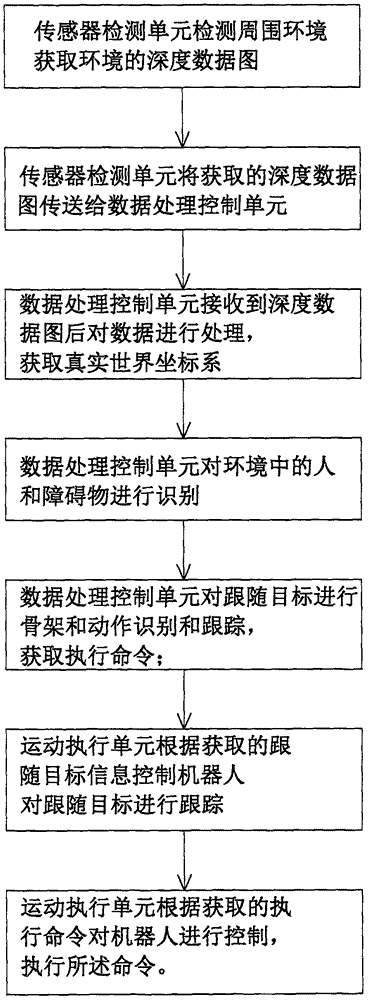
[0019] The vision following control method of a robot described in the present invention, the robot includes a sensor detection unit, a data processing control unit, and a motion execution unit, such as figure 1 As shown, the control method includes:
[0020] Step 1: The sensor detection unit detects the surrounding environment to obtain a depth data map of the environment, and transmits the obtained depth data map to the data processing control unit; this method is easy to operate, and the obtained data information is a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com