Two-degree-of-freedom bionic pectoral fin propulsion mechanism based on boxfish
A technology of propulsion mechanism and degree of freedom, applied in propulsion device engines, ship propulsion, propulsion components, etc., can solve problems such as inability to realize various complex movements and complex structures of robotic fish, achieve complex three-dimensional movements, improve propulsion efficiency, The effect of high mobility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
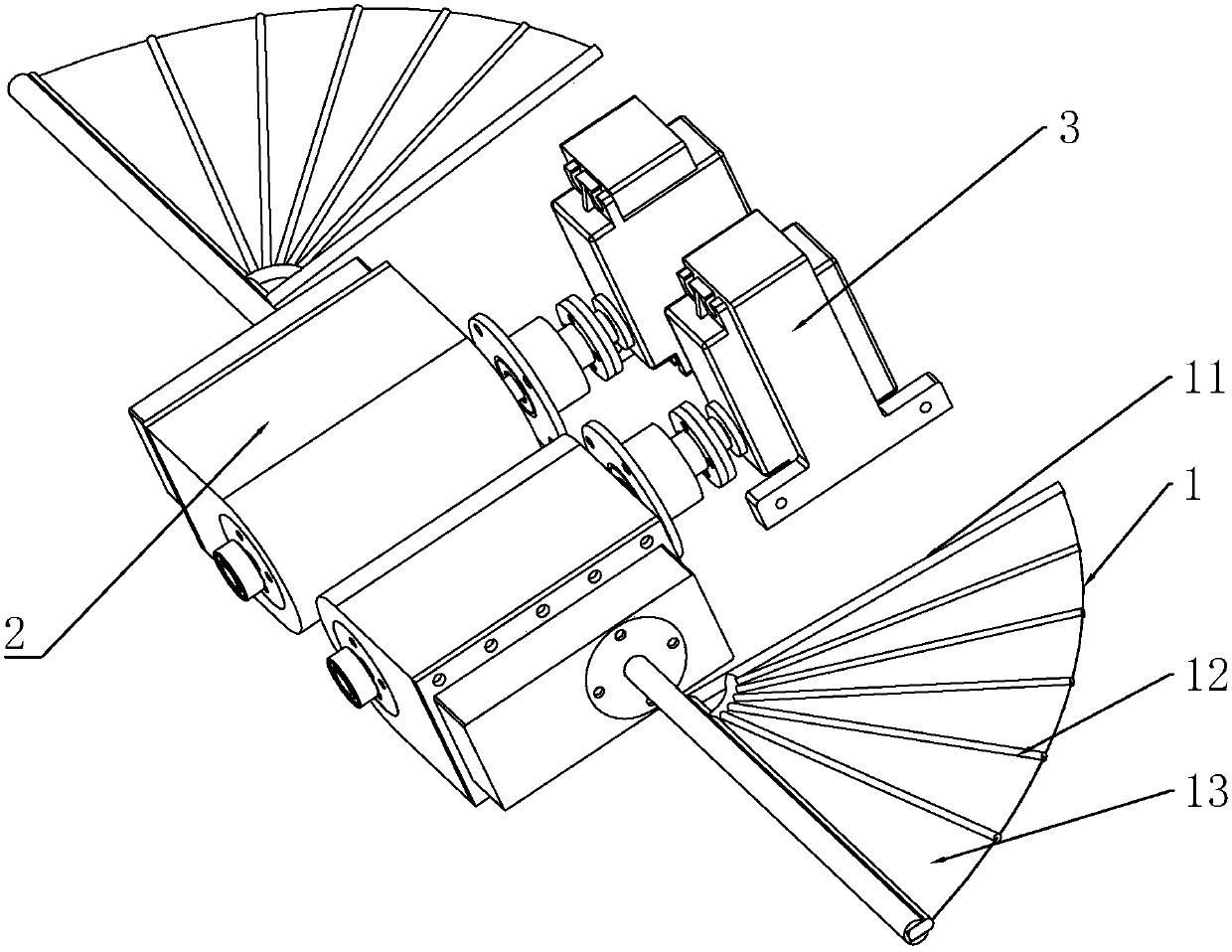
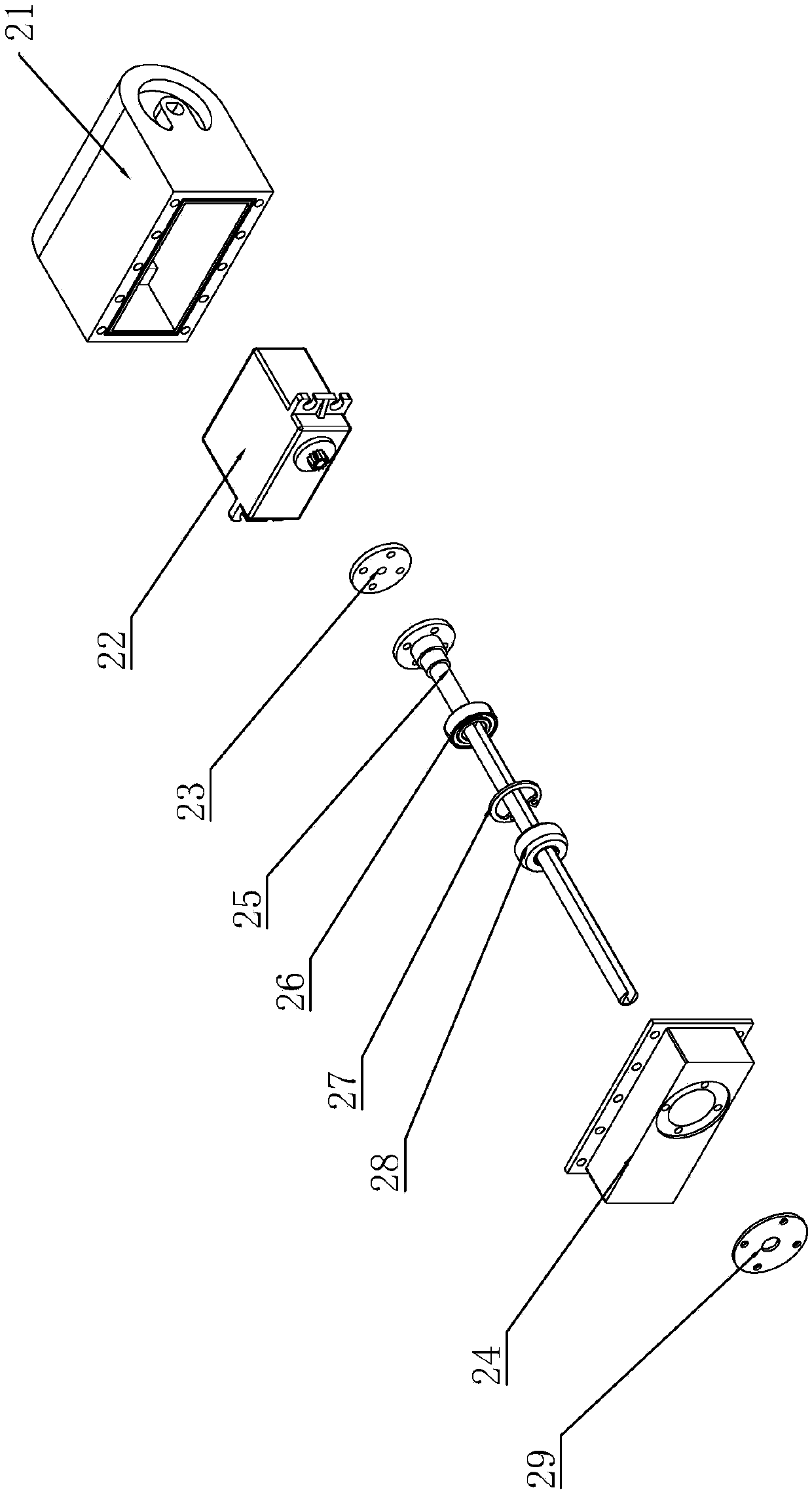
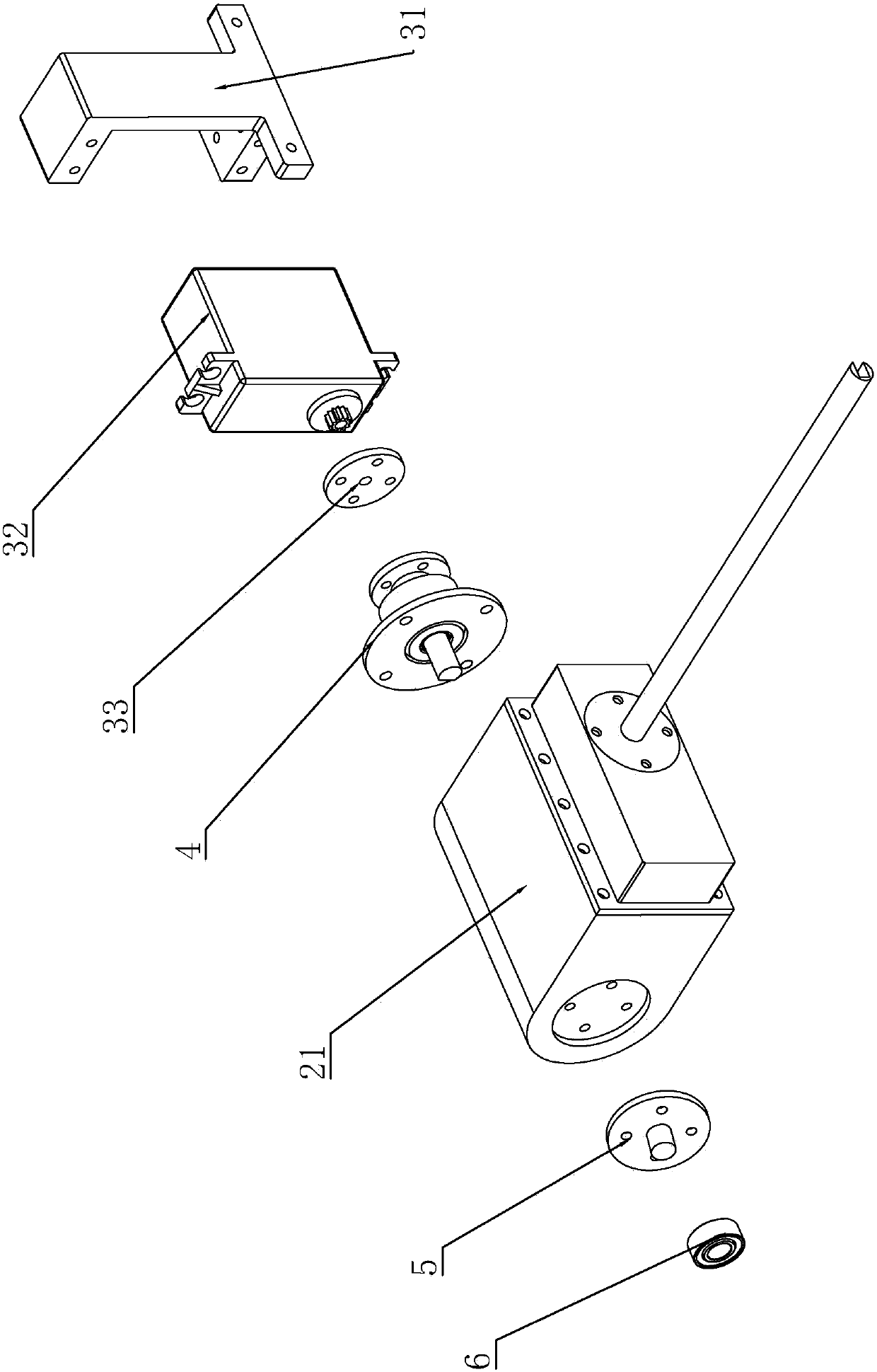
[0026] Such as Figure 1-Figure 4 As shown, the present invention is based on the dual-degree-of-freedom bionic pectoral fin propulsion mechanism of boxfish family fish, including two bionic pectoral fins 1, two sets of swing mechanisms 2 symmetrically arranged, and two sets of flapping mechanisms 3 respectively connected to the two sets of swing mechanisms 2 . Swing mechanism 2 comprises placement box 21, swing steering gear 22, swing steering wheel 23, placement box end cover 24, output shaft 25, swing steering gear 22 is installed in the placement box 21, the output end of swing steering gear 22 and swing steering wheel 23 connection, the output shaft 25 shaft end flange is connected with the swing steering wheel 23 through screws, the first bearing 26 is installed on the output shaft 25 and is axially positioned by the first retaining ring 27, and the first bearing 26 is installed on the end cover of the housing box 24, the housing box end cover 24 and the housing box 21 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com