Method for feeding patient by using electromagnetic joint manipulator
A technology of electromagnetic joints and manipulators, which is applied in the field of flexible manipulators, can solve the problems that paper cups cannot be fine-tuned, endanger patients, get sick, and injure patients.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
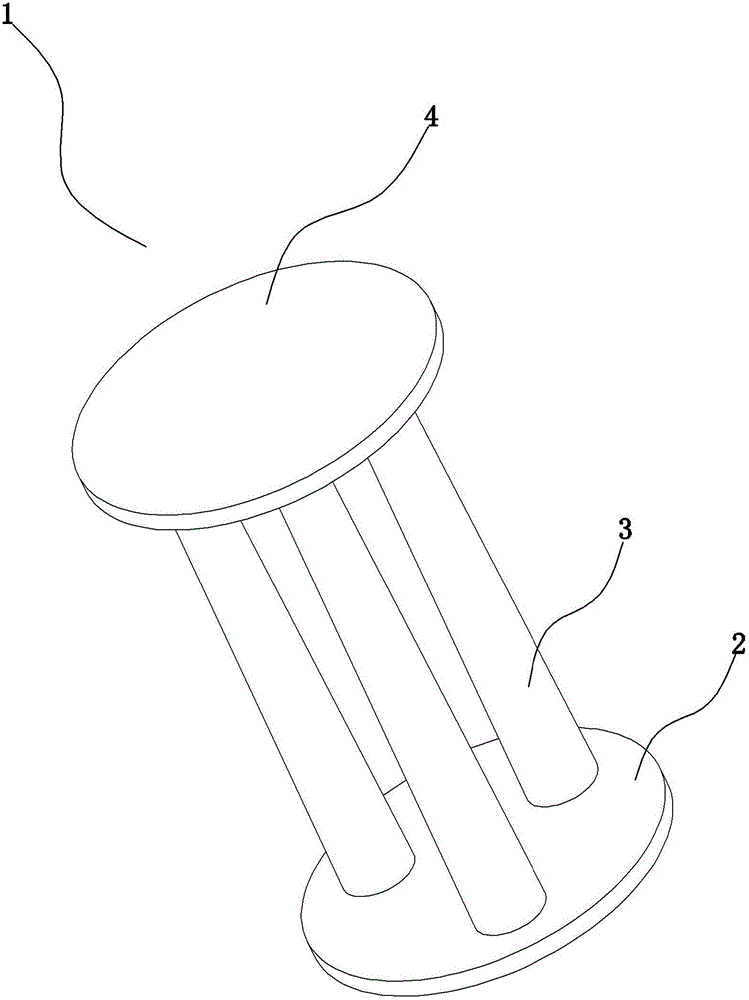
[0060] Such as Figure 1-6 As shown in 11, the electromagnetic joint manipulator of the present invention includes a manipulator palm, a manipulator finger, a manipulator arm, an electromagnetic flexible joint 1 and a circuit control part. One end of the arm is fixed to the frame. see figure 1 , the other end of the arm is connected to the palm through the electromagnetic flexible joint 1 , the palm is connected to the finger through the electromagnetic flexible joint 1 , and each joint of the finger is an electromagnetic flexible joint 1 .
[0061] see figure 1 and figure 2 , the electromagnetic flexible joint 1 includes a lower plate 2, a telescopic column 3 and an upper plate 4, the lower plate 2 is connected with the upper plate 4 through three telescopic columns 3, and the axes of the three telescopic columns 3 are all connected to the circumferential direction of the upper plate 4 and the lower plate 2 0°, 120°, 240° positions are fixed.
[0062] see figure 2 and...
Embodiment 2
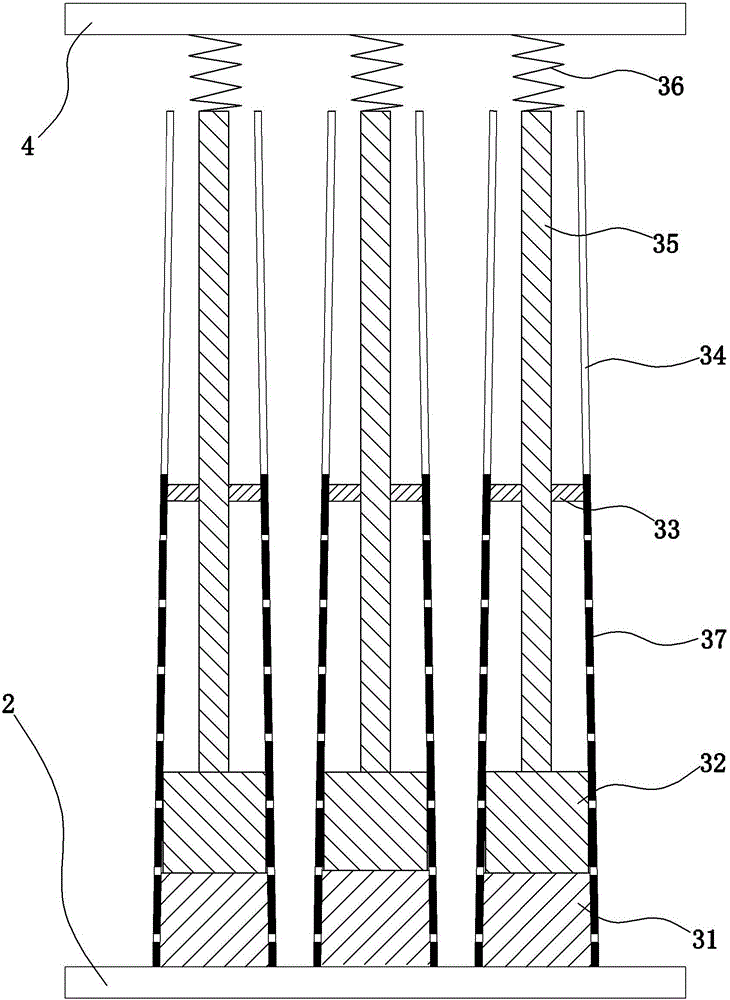
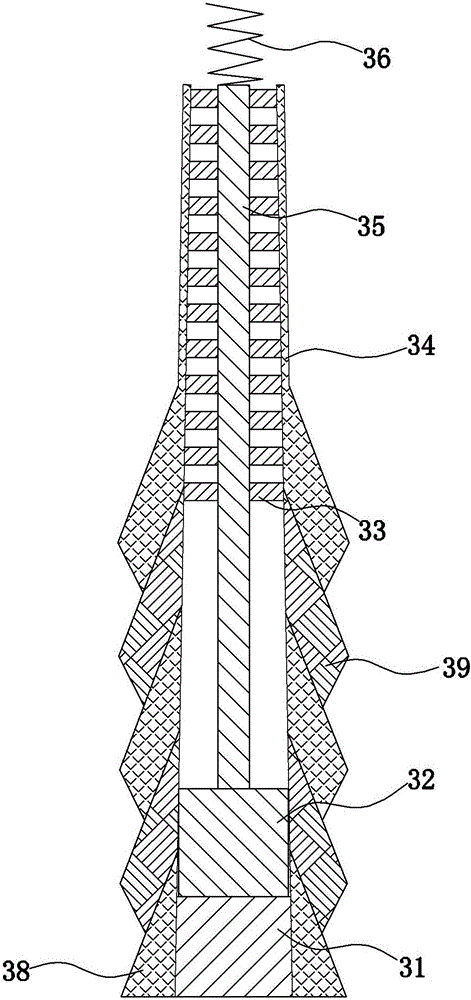
[0079] The difference between this embodiment 2 and embodiment 1 is that, as figure 2 , Figure 7 , Figure 8 , Figure 9 , Figure 10 shown, see figure 2 , The ejector rod 35 is a flexible rod, and the middle part of the inner cavity of the flexible cylinder 34 is provided with a limit ring 33 . The inner diameter of the limit ring 33 is the same as the outer diameter of the push rod 35 , and the limit ring 33 is used to limit the permanent magnet 32 and guide the push rod 35 .
[0080] see Figure 7 , The flexible cylinder 34 is composed of sleeves arranged in the shape of shrimp shells. The sleeve includes a bottom sleeve 38 and a surface limiting sleeve 391 .
[0081] see Figure 8 , The bottom of the flexible cylinder 34 is a bottom cover 38. Bottom cover 38 is circular platform shape, and the peripheral surface that bottom cover 38 external diameters is bigger is used for fixing lower plate 2, and electromagnet 31 is fixed in bottom cover 38, and a plurality...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com