Unmanned aerial vehicle control system and unmanned aerial vehicle control method
A control system and control method technology, which is applied in control/adjustment system, non-electric variable control, speed/acceleration control, etc., can solve the problems of complex control and operation of UAV, and achieve the effect of simplifying operation and reducing operation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
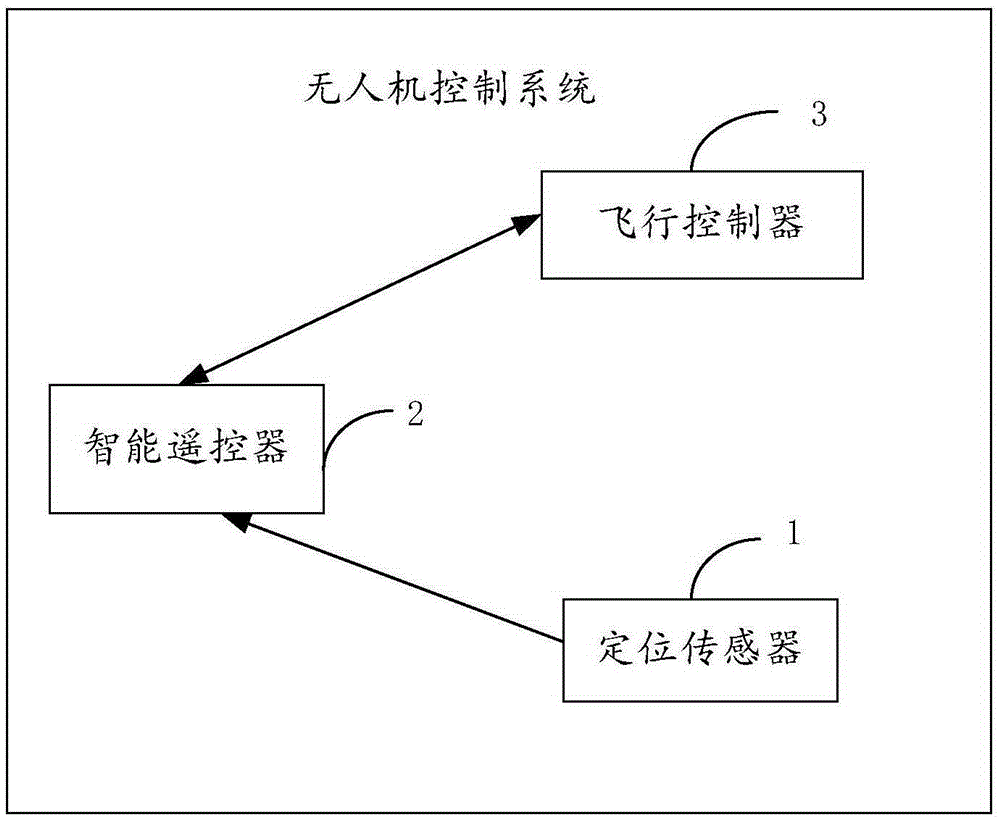
[0032] The first embodiment of the present invention provides a drone control system, such as figure 1 As shown, the system includes: a positioning sensor 1, a smart remote controller 2, and a flight controller 3 installed on the drone.
[0033] Wherein, the positioning sensor 1 may adopt a GPS positioning sensor, which obtains the position information of the current operator by receiving signals from at least 4 GPS satellites, and sends the position information of the current operator to the smart remote control 2 using a wireless serial port such as Bluetooth. When in use, the GPS positioning sensor is worn on the operator's chest, arm, etc., to speed up the GPS search speed and improve the GPS positioning accuracy.
[0034] The smart remote controller 2 includes: a first data transmission module and a control module. Further, it also includes a display module, a key module, and a control identification module.
[0035] Among them, the display module and the key module are arrange...
Embodiment 2
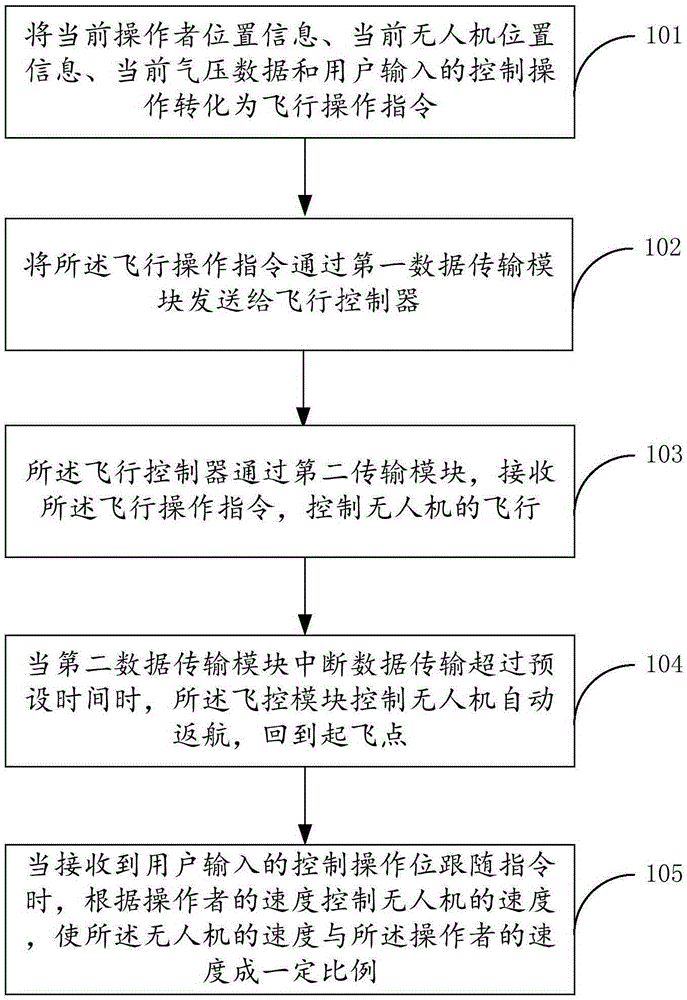
[0049] The second embodiment of the present invention provides a drone control method, which is used to control the drone control system in the first embodiment. Such as figure 2 As shown, the method includes:
[0050] 101. Convert the current operator position information, current UAV position information, current air pressure data and user input control operations into flight operation instructions; after statistics and analysis, the flight operation instructions for controlling UAVs are mainly divided into four major categories class:
[0051] 1. Unlock, take off, land, return (basic operations necessary for flight);
[0052] 2. Forward, retreat, move left, move right, spin left, spin right, raise, lower, circle radius increases, circle radius decreases (space operation of flight);
[0053] 3. Follow, hover, circle, spin, gimbal pitch (advanced flight mode operation);
[0054] 4. Power on, code matching (operation of the smart remote control itself);
[0055] Therefore, the button...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com