Curve Online Seam Tracking Method for Arc Welding Robot Welding
A robot welding and robot technology, applied in welding equipment, arc welding equipment, manufacturing tools, etc., can solve the problems of error, no fixed reference value, etc., and achieve the effect of simple solution and improved tracking accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other.
[0029] The present invention will be described in detail below in conjunction with embodiment:
[0030] Implement the process of the present invention:
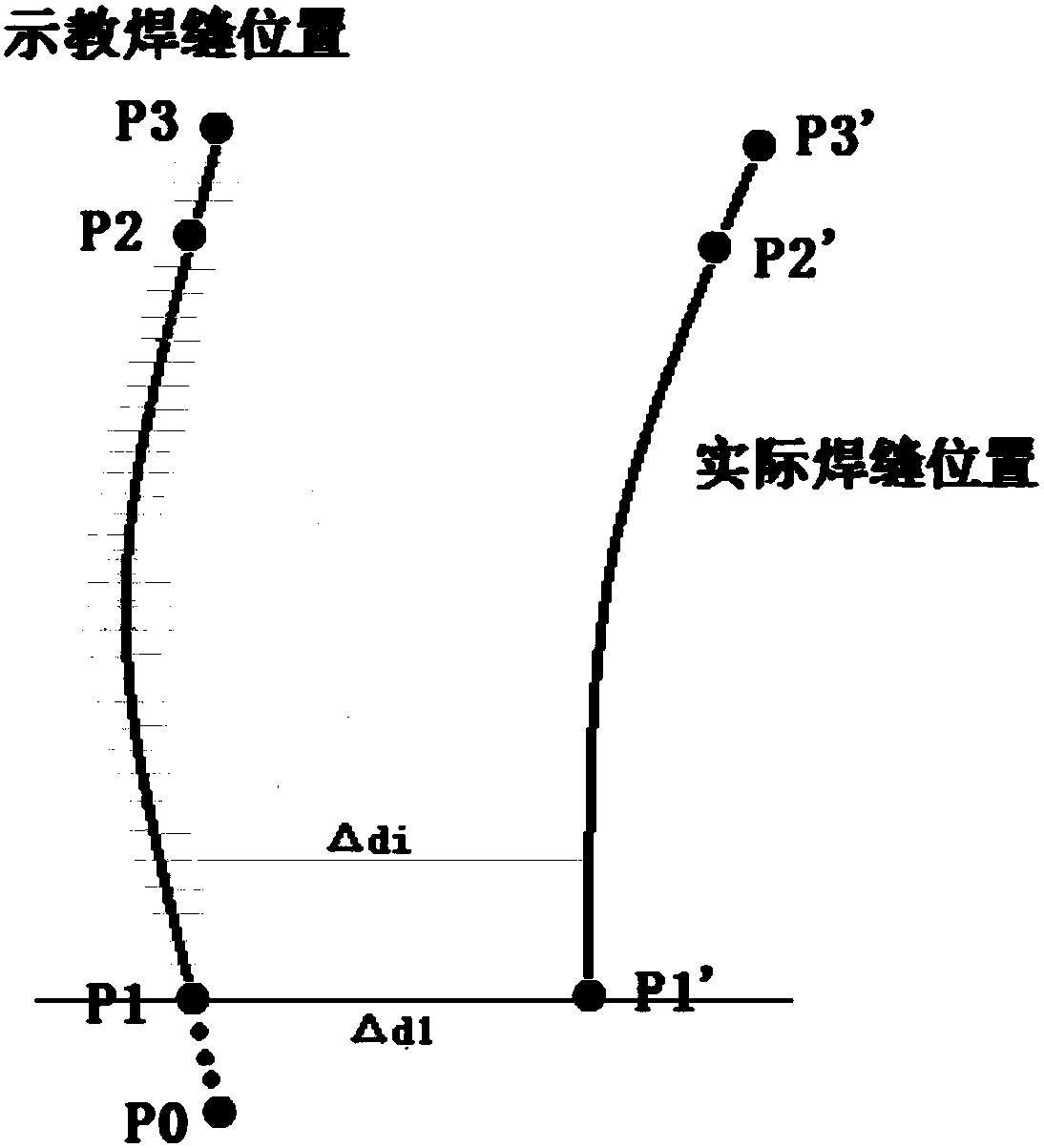
[0031] Such as figure 1 As shown, it indicates the teaching welding seam position and the actual welding seam position.
[0032] P1 is the starting point of the teaching welding seam, and P1' is the starting point of the actual welding seam.
[0033] P3 is the end point of the teaching weld, and P3' is the end point of the actual weld.
[0034] P0 is the position point separated from the starting point of the welding seam by the distance between the measurement sensor and the robot. It is the reverse extension of point P1 according to the curvature, and the straight-line distance from point P1 is equal to the distance from the front.
[0035] P2 is the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com