Hooped mine elevator patrol robot mechanism based on electromagnetic chucks
An inspection robot and electromagnetic sucker technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of damage to the paint protection layer, high energy consumption, and heavy robot weight, and achieve reduction in volume and weight and power. Demand, simple and lightweight effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] The technical solutions of the present invention will be further described below in conjunction with specific embodiments.
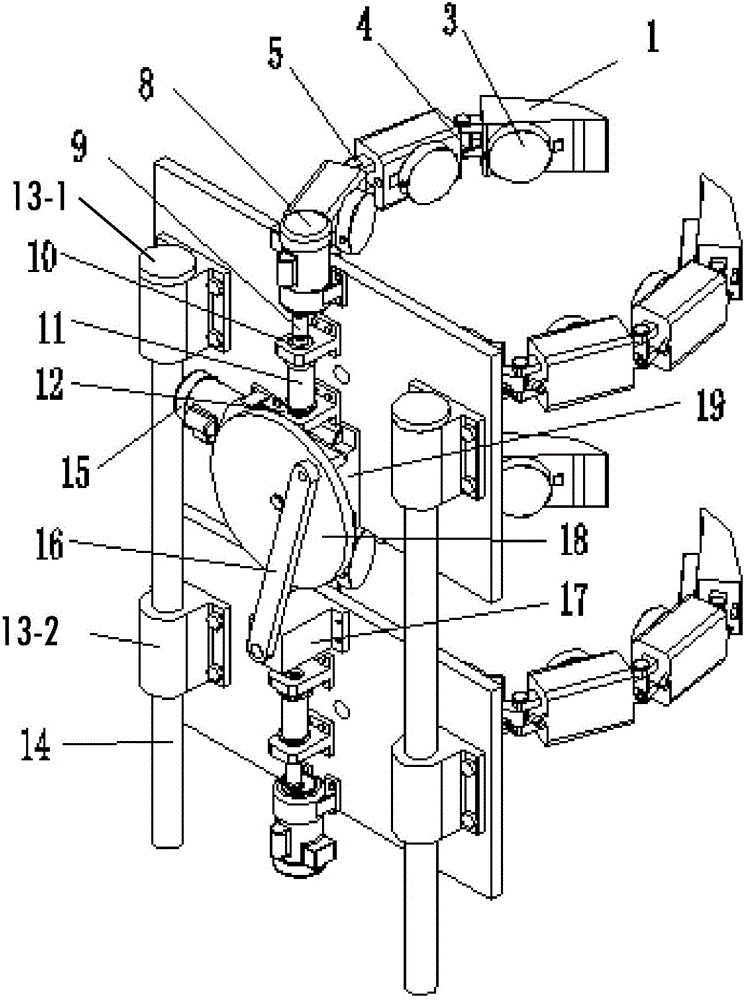
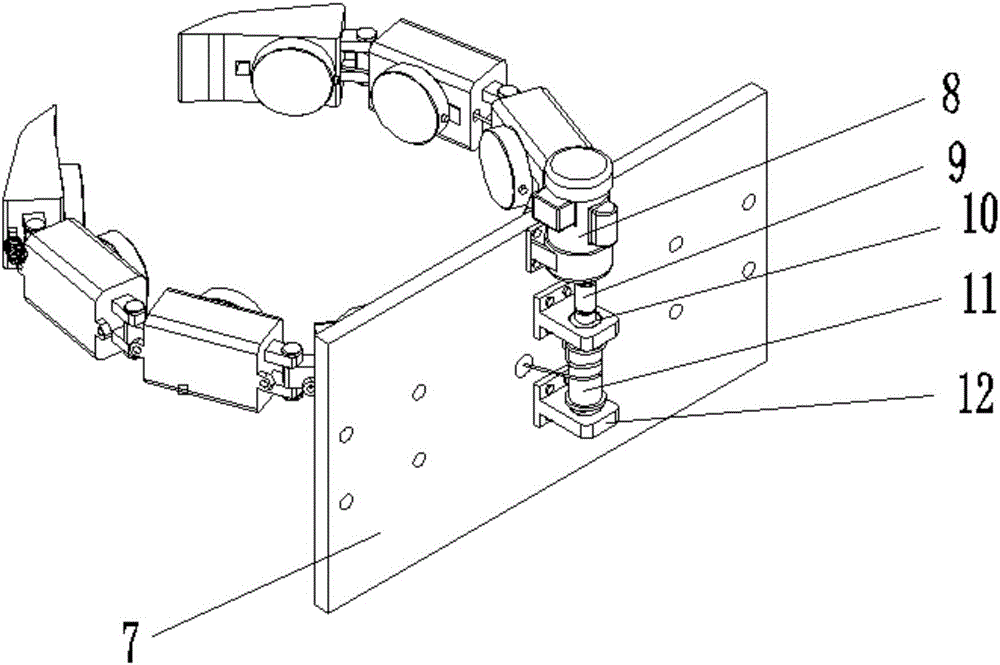
[0023] An electromagnetic suction cup-based hugging coal mine hoist inspection robot mechanism, which is divided into two upper and lower manipulator parts with the same structure, and the two manipulator parts are connected by a crank slider mechanism and a slider slider mechanism. Alternately hold the hoist column tightly, and at the same time combine the crank slider mechanism and the slider slider mechanism to realize the alternate rise of the two manipulator parts so as to realize the overall movement of the robot.
[0024] See attached image 3 And attached Figure 4 , the two manipulator parts respectively include two left-right symmetrical mechanical claws, and each mechanical claw includes a fingertip joint 1 and three intermediate joints 6 (the overall fingertip joints are approximately triangular, and the fingertips of the fingertip jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com