Map construction method utilizing mobile robot and work method utilizing map
A self-moving, robotic technology, applied in instruments, special data processing applications, two-dimensional position/channel control, etc., can solve problems such as robot damage, robot collision with obstacles, etc., to avoid collisions and improve work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
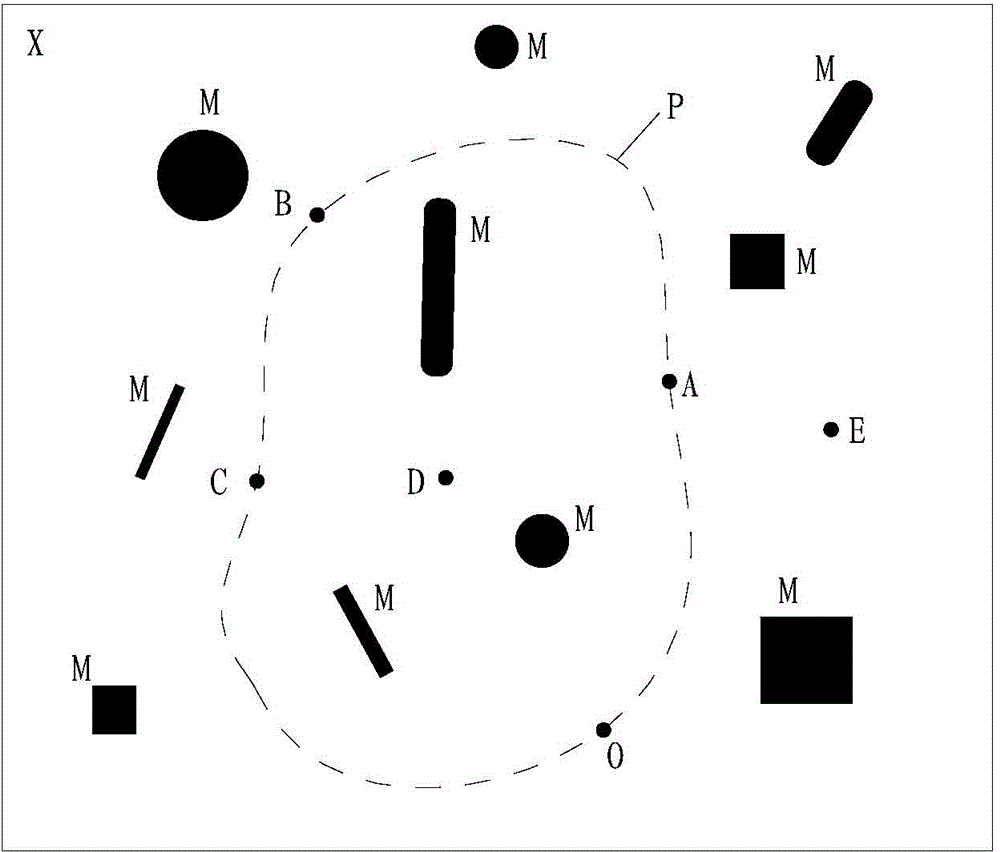
[0023] figure 1 Construct a map schematic for the present invention. Such as figure 1 As shown, since the mobile robot is in the space X to be worked, the solid blocks of various shapes scattered in the space X to be worked are a plurality of obstacles M. Specifically, the process of building a map and setting a work point from a mobile robot is as follows:
[0024] First, put the self-mobile robot into the space X to be operated, which is a certain room, such as a living room, and establish a coordinate system corresponding to the space to be operated, which can be a Cartesian coordinate system or a polar coordinate system; Secondly, manual control guides the self-mobile robot to walk in an open area avoiding obstacles M in the work space X to avoid unnecessary collisions, figure 1 The dotted line in is the walking path P of the self-mobile robot; in the process of walking, the position of the obstacle M collected by the self-mobile robot in the space to be worked is corre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com